

山东理工大学高水平教学科研平台设备更新项目投标方案
第一章 多角度多自由度农业机器人行驶性能测试仪
4
第一节 测试对象要求
4
一、 轮式农业机器人适配
4
二、 履带式农业机器人适配
22
第二节 功能实现要求
32
一、 复杂地形运动性能评估
32
二、 测试数据处理功能
50
三、 测试场景切换支持
63
第三节 承载能力要求
70
一、 极限承载质量保障
70
二、 测试机具通行宽度
88
三、 结构强度安全认证
100
第四节 用电需求说明
111
一、 设备功率配置参数
111
二、 供电系统规格要求
120
三、 电源适配与配电箱
135
第五节 测试模块配置
151
一、 楼梯测试模块参数
151
二、 障碍模块技术规格
159
三、 斜坡模块性能指标
176
第六节 操作系统配置
182
一、 人机交互系统功能
182
二、 监控系统技术参数
200
三、 人脸识别系统配置
216
第七节 外壳防护配置
225
一、 测试通道卷帘门设置
226
二、 防护罩照明系统
234
三、 防护罩标识设计
245
第八节 设备交付与验收
264
一、 全新合格产品提供
264
二、 标准规范符合性
274
三、 技术资料完整性
293
四、 质量保证期责任
314
第二章 售后服务要求
335
第一节 设备安装调试
335
一、 专业安装团队组建
335
二、 设备功能验证流程
351
第二节 操作培训
358
一、 现场操作技能培训
358
二、 培训资料体系建设
371
第三节 定期维护
387
一、 年度设备巡检服务
387
二、 系统软件维护优化
402
第四节 技术支持
423
一、 全天候响应服务
424
二、 响应时效保障机制
436
第五节 软件升级与维护
441
一、 终身免费升级服务
441
二、 升级实施管控流程
455
多角度多自由度农业机器人行驶性能测试仪
测试对象要求
轮式农业机器人适配
测试对象明确界定
轮式机器人范围界定
适用类型说明
1)明确适用于各类轮式农业机器人,无论是采用电动驱动、燃油驱动,还是其他新型驱动方式的轮式农业机器人,均在适配范围内。这些机器人在农业生产中承担着多样化的任务,如播种、施肥、除草、采摘等,每种任务对机器人的性能和功能要求各异,本测试设备都能为其提供精确的性能评估。
轮式农业机器人
除草机器人
采摘机器人
2)适用于以轮式为主要移动方式的农业作业机器人,这些机器人在农田、果园、温室等不同环境中发挥着重要作用。播种机器人可精确控制种子的播撒位置和深度,施肥机器人能根据土壤肥力情况精准施肥,除草机器人则能高效识别并清除杂草,本测试设备能全面评估它们在实际作业中的性能表现。
3)适用于不同轮径、轮距的轮式农业机器人,以满足多样化的农业生产需求。不同的农业生产场景和作业任务对机器人的轮径和轮距有不同要求,小轮径机器人在狭窄空间中具有更好的灵活性,大轮径机器人则更适合在复杂地形中行驶。本测试设备能够针对不同轮径、轮距的机器人进行定制化测试,确保测试结果的准确性和可靠性。
应用场景界定
1)适用于农田、果园、温室等多种农业生产场景下的轮式农业机器人测试。在农田中,机器人需要应对不同的土壤条件和种植模式;在果园中,需要适应果树的布局和地形特点;在温室中,要考虑温湿度、光照等环境因素的影响。本测试设备能够模拟这些不同的场景,为机器人在实际应用中的性能表现提供准确评估。
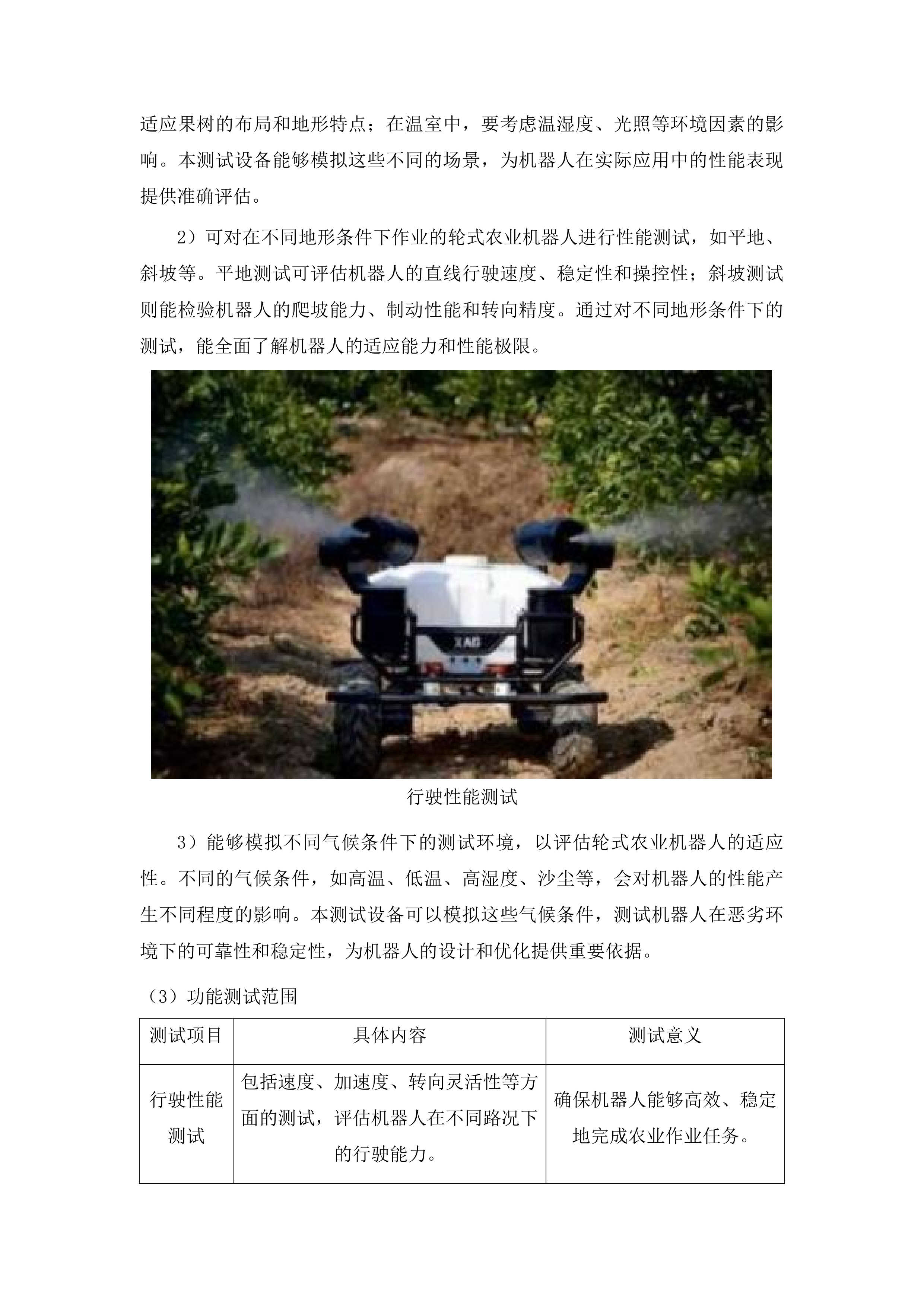
2)可对在不同地形条件下作业的轮式农业机器人进行性能测试,如平地、斜坡等。平地测试可评估机器人的直线行驶速度、稳定性和操控性;斜坡测试则能检验机器人的爬坡能力、制动性能和转向精度。通过对不同地形条件下的测试,能全面了解机器人的适应能力和性能极限。
行驶性能测试
3)能够模拟不同气候条件下的测试环境,以评估轮式农业机器人的适应性。不同的气候条件,如高温、低温、高湿度、沙尘等,会对机器人的性能产生不同程度的影响。本测试设备可以模拟这些气候条件,测试机器人在恶劣环境下的可靠性和稳定性,为机器人的设计和优化提供重要依据。
功能测试范围
测试项目
具体内容
测试意义
行驶性能测试
包括速度、加速度、转向灵活性等方面的测试,评估机器人在不同路况下的行驶能力。
确保机器人能够高效、稳定地完成农业作业任务。
负载能力测试
测试机器人在不同负载情况下的工作能力,包括最大承载能力和负载分布对行驶的影响。
为机器人的设计和优化提供参考,确保其能够满足实际作业需求。
避障能力和导航精度测试
评估机器人在复杂环境中的避障能力和导航精度,确保其能够安全、准确地行驶。
提高机器人的作业效率和安全性,减少事故发生的可能性。
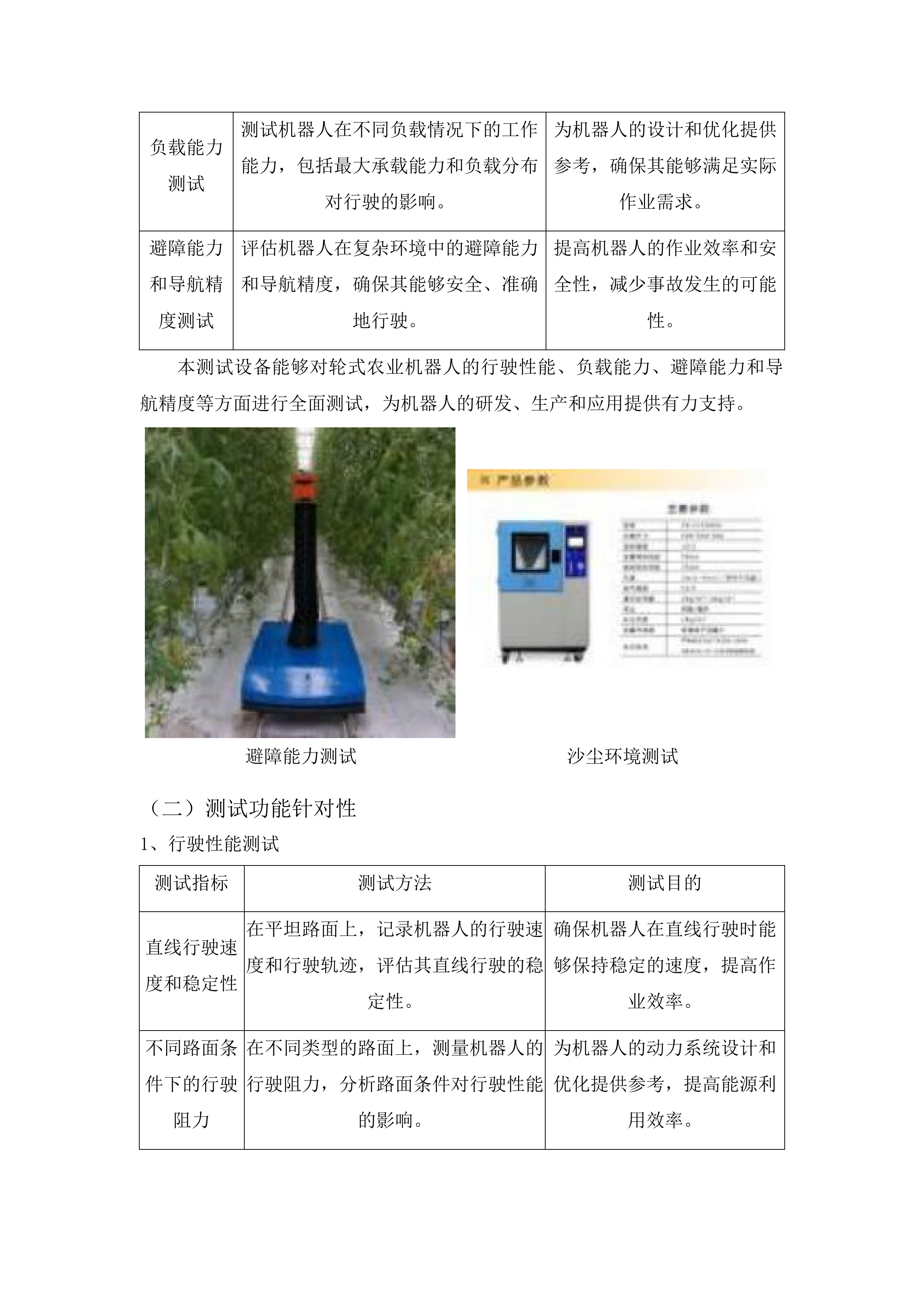
本测试设备能够对轮式农业机器人的行驶性能、负载能力、避障能力和导航精度等方面进行全面测试,为机器人的研发、生产和应用提供有力支持。
避障能力测试
沙尘环境测试
测试功能针对性
行驶性能测试
测试指标
测试方法
测试目的
直线行驶速度和稳定性
在平坦路面上,记录机器人的行驶速度和行驶轨迹,评估其直线行驶的稳定性。
确保机器人在直线行驶时能够保持稳定的速度,提高作业效率。
不同路面条件下的行驶阻力
在不同类型的路面上,测量机器人的行驶阻力,分析路面条件对行驶性能的影响。
为机器人的动力系统设计和优化提供参考,提高能源利用效率。
转向半径和转向精度
通过测试机器人的转向半径和转向精度,评估其在狭窄空间中的转向能力。
确保机器人能够灵活地转向,适应不同的作业环境。
本测试设备能够对轮式农业机器人的行驶性能进行精确测试,为机器人的设计和优化提供重要依据。
负载能力测试
测试项目
测试方法
测试意义
不同负载下的行驶性能变化
在机器人上加载不同重量的负载,记录其行驶速度、加速度、能耗等参数的变化。
了解负载对机器人行驶性能的影响,为合理配置负载提供参考。
最大承载能力和负载分布对行驶的影响
逐渐增加负载重量,直到机器人达到最大承载能力,同时分析负载分布对行驶稳定性的影响。
确定机器人的最大承载能力,优化负载分布,提高行驶安全性。
长时间负载作业下的可靠性
让机器人在长时间负载作业的情况下运行,观察其是否出现故障或性能下降的情况。
评估机器人在实际作业中的可靠性,为用户提供可靠的产品。
本测试设备能够对轮式农业机器人的负载能力进行全面测试,为机器人的设计和优化提供有力支持。
封闭式运输车辆
环境适应性测试
1)模拟不同温度、湿度环境,测试轮式农业机器人的性能稳定性。在高温、低温、高湿度等环境条件下,机器人的电子元件、机械部件等可能会受到影响,导致性能下降或出现故障。通过模拟这些环境条件,测试机器人的性能稳定性,为机器人的设计和优化提供重要依据。
2)评估轮式农业机器人在沙尘、雨水等恶劣环境下的防护性能。沙尘和雨水可能会进入机器人的内部,损坏电子元件和机械部件,影响机器人的正常运行。通过测试机器人在恶劣环境下的防护性能,确保其能够在复杂的农业生产环境中可靠工作。
3)测试轮式农业机器人在不同光照条件下的视觉系统性能。光照条件的变化会影响机器人的视觉系统的识别精度和可靠性,从而影响机器人的作业效果。通过测试机器人在不同光照条件下的视觉系统性能,优化视觉系统的设计,提高机器人的作业精度和可靠性。
测试标准遵循
行业标准执行
1)严格按照国家和行业相关标准进行轮式农业机器人测试,确保测试过程的规范性和测试结果的准确性。这些标准涵盖了机器人的性能指标、安全要求、测试方法等方面,是保证机器人质量和安全性的重要依据。
2)遵循农业机器人性能测试的通用规范和流程,采用科学、合理的测试方法和手段,确保测试结果的可比性和可靠性。在测试过程中,严格控制测试条件,对测试数据进行准确记录和分析,为机器人的研发和生产提供有力支持。
3)确保测试结果的准确性和可比性,为用户提供客观、公正的测试报告。通过与行业内其他同类产品的测试结果进行对比,帮助用户了解机器人的性能优势和不足之处,为用户的选择提供参考。
安全标准保障
保障措施
具体内容
保障意义
遵守安全操作规程
在测试过程中,严格遵守安全操作规程,确保人员和设备的安全。操作人员必须经过专业培训,熟悉测试设备的操作方法和安全注意事项。
避免安全事故的发生,保障人员和设备的安全。
定期维护和检查测试设备
对测试设备进行定期维护和检查,确保其安全性和可靠性。定期检查设备的电气系统、机械部件等,及时发现和排除潜在的安全隐患。
保证测试设备的正常运行,提高测试结果的准确性。
制定应急预案
制定应急预案,以应对可能出现的安全事故。应急预案应包括事故的应急处理流程、救援措施、责任分工等内容,确保在事故发生时能够迅速、有效地进行处理。
减少安全事故的损失,保障人员和设备的安全。
本测试设备严格遵守安全标准,为轮式农业机器人的测试提供安全可靠的保障。
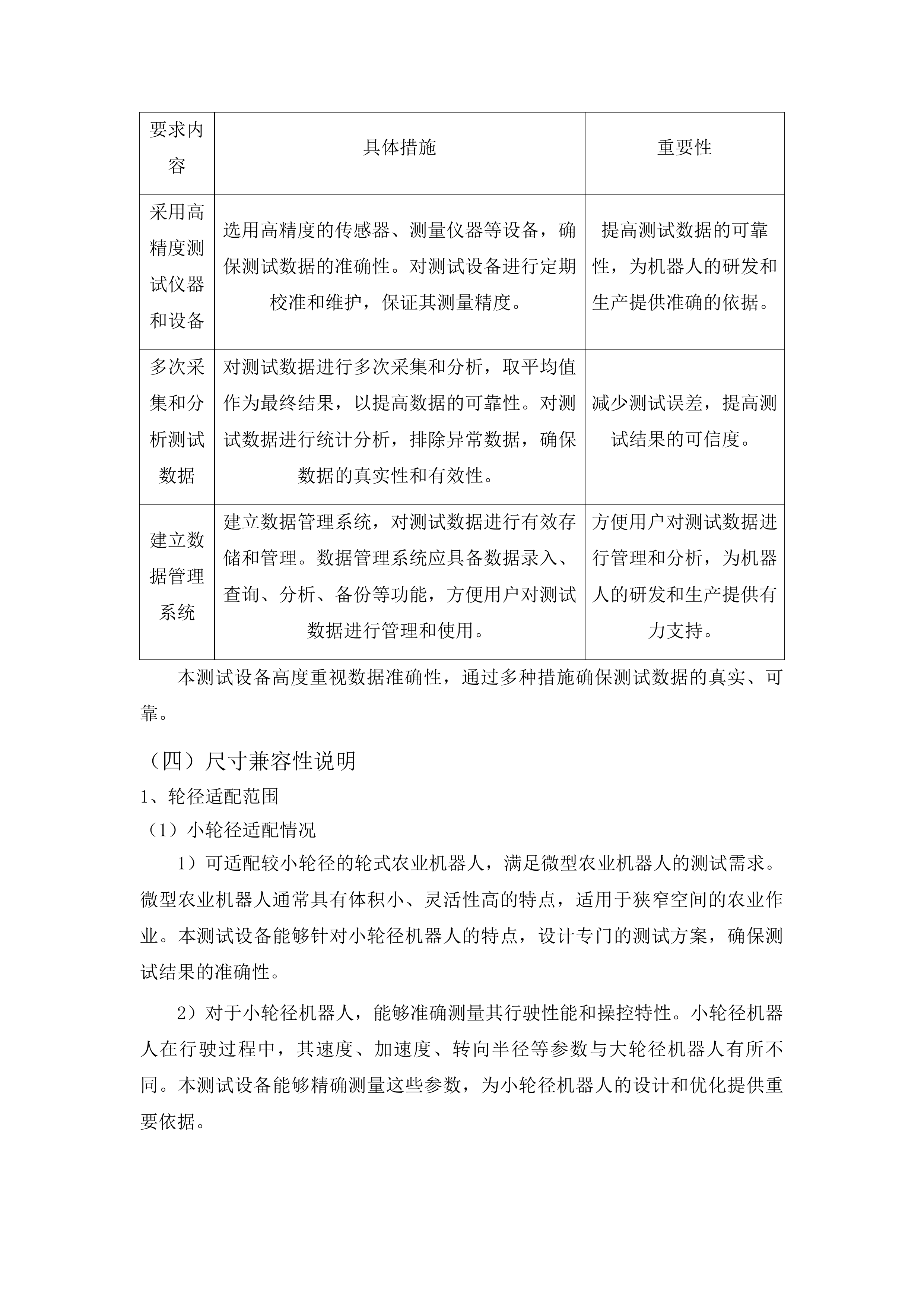
数据准确性要求
要求内容
具体措施
重要性
采用高精度测试仪器和设备
选用高精度的传感器、测量仪器等设备,确保测试数据的准确性。对测试设备进行定期校准和维护,保证其测量精度。
提高测试数据的可靠性,为机器人的研发和生产提供准确的依据。
多次采集和分析测试数据
对测试数据进行多次采集和分析,取平均值作为最终结果,以提高数据的可靠性。对测试数据进行统计分析,排除异常数据,确保数据的真实性和有效性。
减少测试误差,提高测试结果的可信度。
建立数据管理系统
建立数据管理系统,对测试数据进行有效存储和管理。数据管理系统应具备数据录入、查询、分析、备份等功能,方便用户对测试数据进行管理和使用。
方便用户对测试数据进行管理和分析,为机器人的研发和生产提供有力支持。
本测试设备高度重视数据准确性,通过多种措施确保测试数据的真实、可靠。
尺寸兼容性说明
轮径适配范围
小轮径适配情况
1)可适配较小轮径的轮式农业机器人,满足微型农业机器人的测试需求。微型农业机器人通常具有体积小、灵活性高的特点,适用于狭窄空间的农业作业。本测试设备能够针对小轮径机器人的特点,设计专门的测试方案,确保测试结果的准确性。
2)对于小轮径机器人,能够准确测量其行驶性能和操控特性。小轮径机器人在行驶过程中,其速度、加速度、转向半径等参数与大轮径机器人有所不同。本测试设备能够精确测量这些参数,为小轮径机器人的设计和优化提供重要依据。
3)在小轮径机器人测试时,确保测试设备的稳定性和准确性。由于小轮径机器人的重量较轻,在测试过程中容易受到外界因素的影响。本测试设备采用了先进的稳定技术和高精度的测量仪器,能够有效减少外界因素的干扰,确保测试结果的准确性和稳定性。
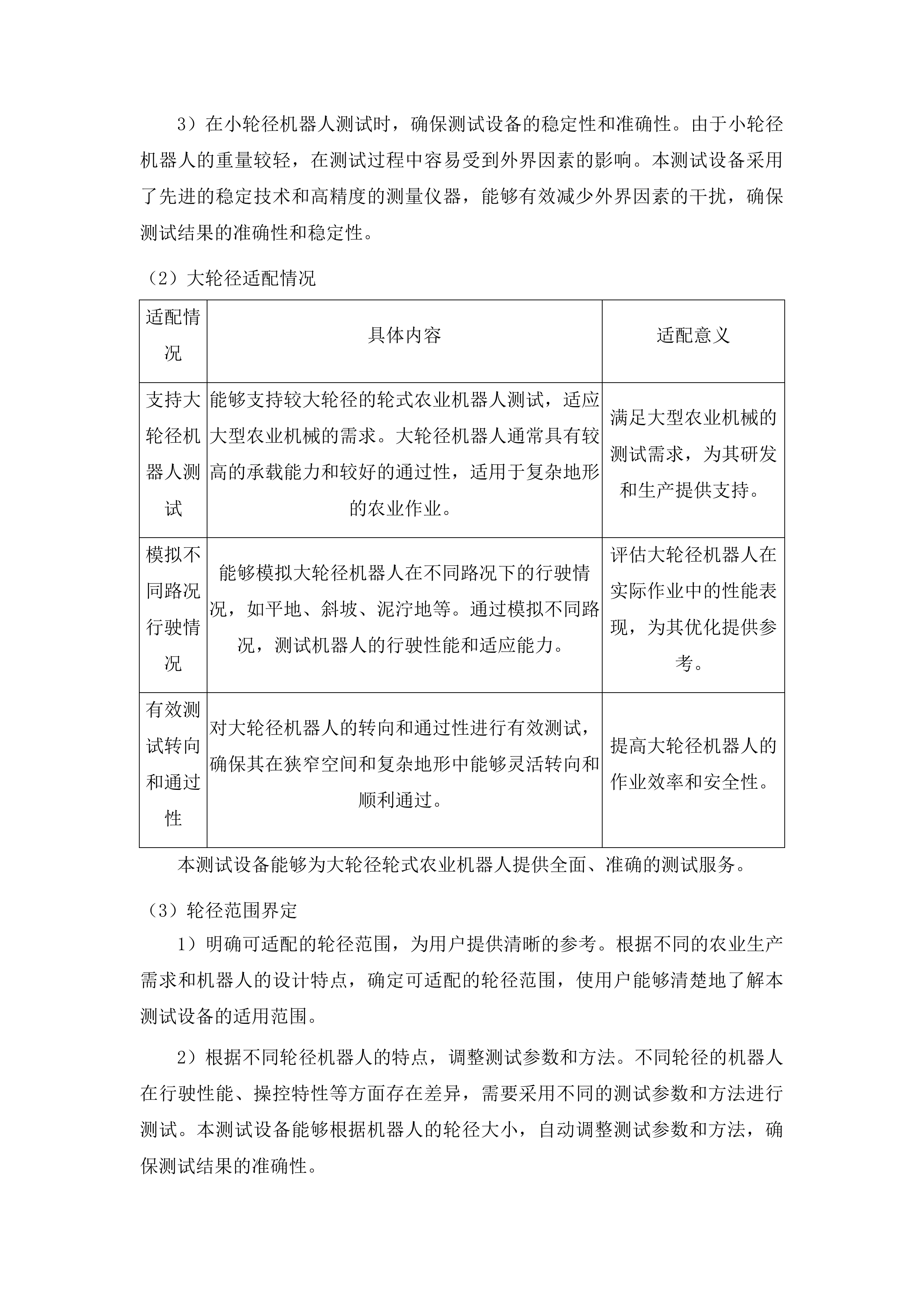
大轮径适配情况
适配情况
具体内容
适配意义
支持大轮径机器人测试
能够支持较大轮径的轮式农业机器人测试,适应大型农业机械的需求。大轮径机器人通常具有较高的承载能力和较好的通过性,适用于复杂地形的农业作业。
满足大型农业机械的测试需求,为其研发和生产提供支持。
模拟不同路况行驶情况
能够模拟大轮径机器人在不同路况下的行驶情况,如平地、斜坡、泥泞地等。通过模拟不同路况,测试机器人的行驶性能和适应能力。
评估大轮径机器人在实际作业中的性能表现,为其优化提供参考。
有效测试转向和通过性
对大轮径机器人的转向和通过性进行有效测试,确保其在狭窄空间和复杂地形中能够灵活转向和顺利通过。
提高大轮径机器人的作业效率和安全性。
本测试设备能够为大轮径轮式农业机器人提供全面、准确的测试服务。
轮径范围界定
1)明确可适配的轮径范围,为用户提供清晰的参考。根据不同的农业生产需求和机器人的设计特点,确定可适配的轮径范围,使用户能够清楚地了解本测试设备的适用范围。
2)根据不同轮径机器人的特点,调整测试参数和方法。不同轮径的机器人在行驶性能、操控特性等方面存在差异,需要采用不同的测试参数和方法进行测试。本测试设备能够根据机器人的轮径大小,自动调整测试参数和方法,确保测试结果的准确性。
3)确保在整个轮径适配范围内,测试结果的可靠性和有效性。在轮径适配范围内,对不同轮径的机器人进行多次测试,验证测试结果的可靠性和有效性。对测试数据进行统计分析,确保测试结果能够真实反映机器人的性能。
轮距适配能力
窄轮距适配
1)能够适配窄轮距的轮式农业机器人,测试其在狭窄空间的行驶性能。窄轮距机器人在狭窄的农田、果园等环境中具有更好的灵活性,能够更方便地进行作业。本测试设备能够模拟狭窄空间的环境,对窄轮距机器人的行驶性能进行测试。
2)评估窄轮距机器人的稳定性和操控性。窄轮距机器人在行驶过程中,其稳定性和操控性相对较差。本测试设备能够通过精确的测量和分析,评估窄轮距机器人的稳定性和操控性,为其设计和优化提供参考。
3)为窄轮距机器人的设计和优化提供数据支持。通过对窄轮距机器人的测试,获取其行驶性能、稳定性、操控性等方面的数据,为其设计和优化提供科学依据。根据测试结果,对机器人的结构、动力系统、控制系统等进行优化,提高其性能和可靠性。
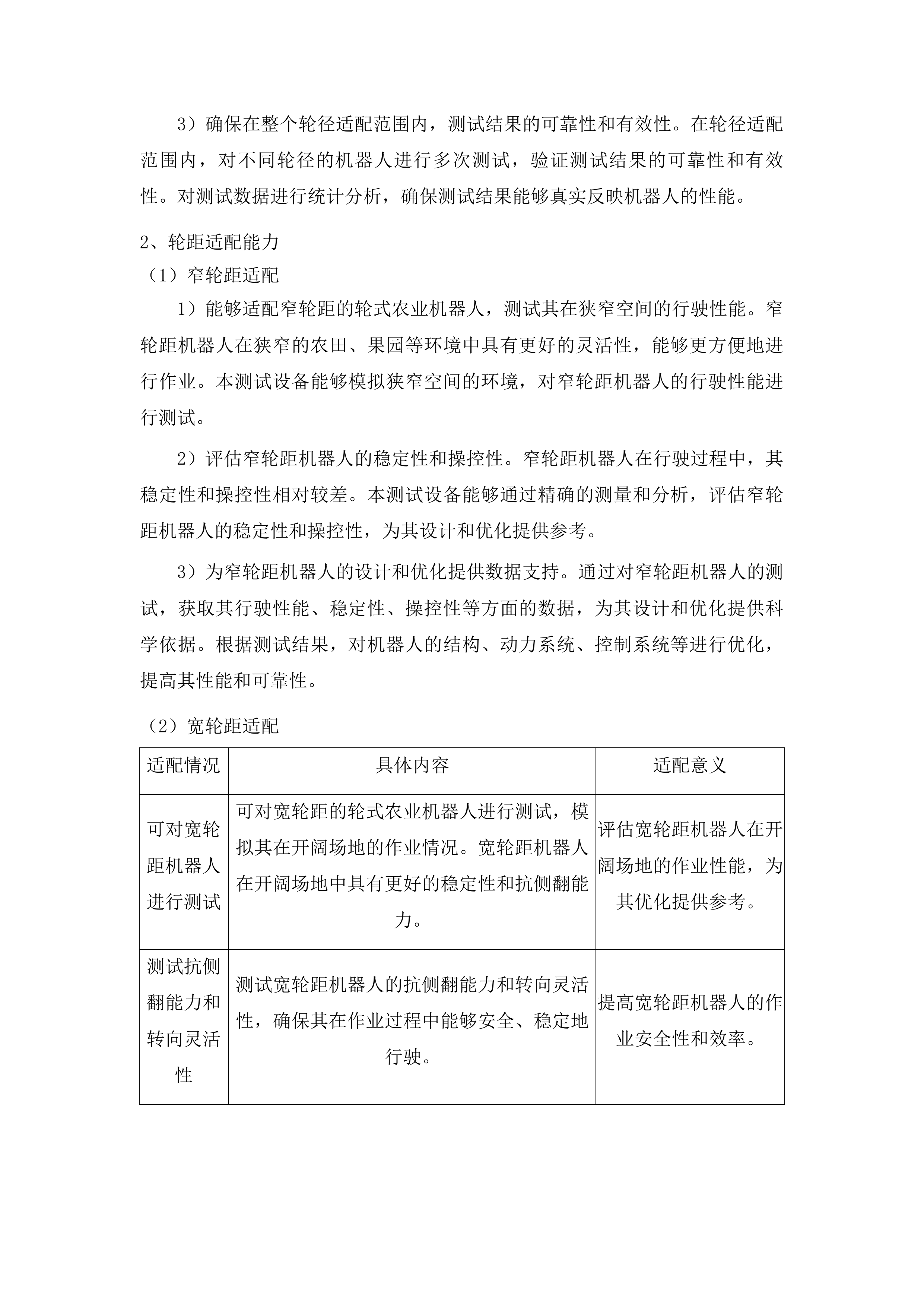
宽轮距适配
适配情况
具体内容
适配意义
可对宽轮距机器人进行测试
可对宽轮距的轮式农业机器人进行测试,模拟其在开阔场地的作业情况。宽轮距机器人在开阔场地中具有更好的稳定性和抗侧翻能力。
评估宽轮距机器人在开阔场地的作业性能,为其优化提供参考。
测试抗侧翻能力和转向灵活性
测试宽轮距机器人的抗侧翻能力和转向灵活性,确保其在作业过程中能够安全、稳定地行驶。
提高宽轮距机器人的作业安全性和效率。
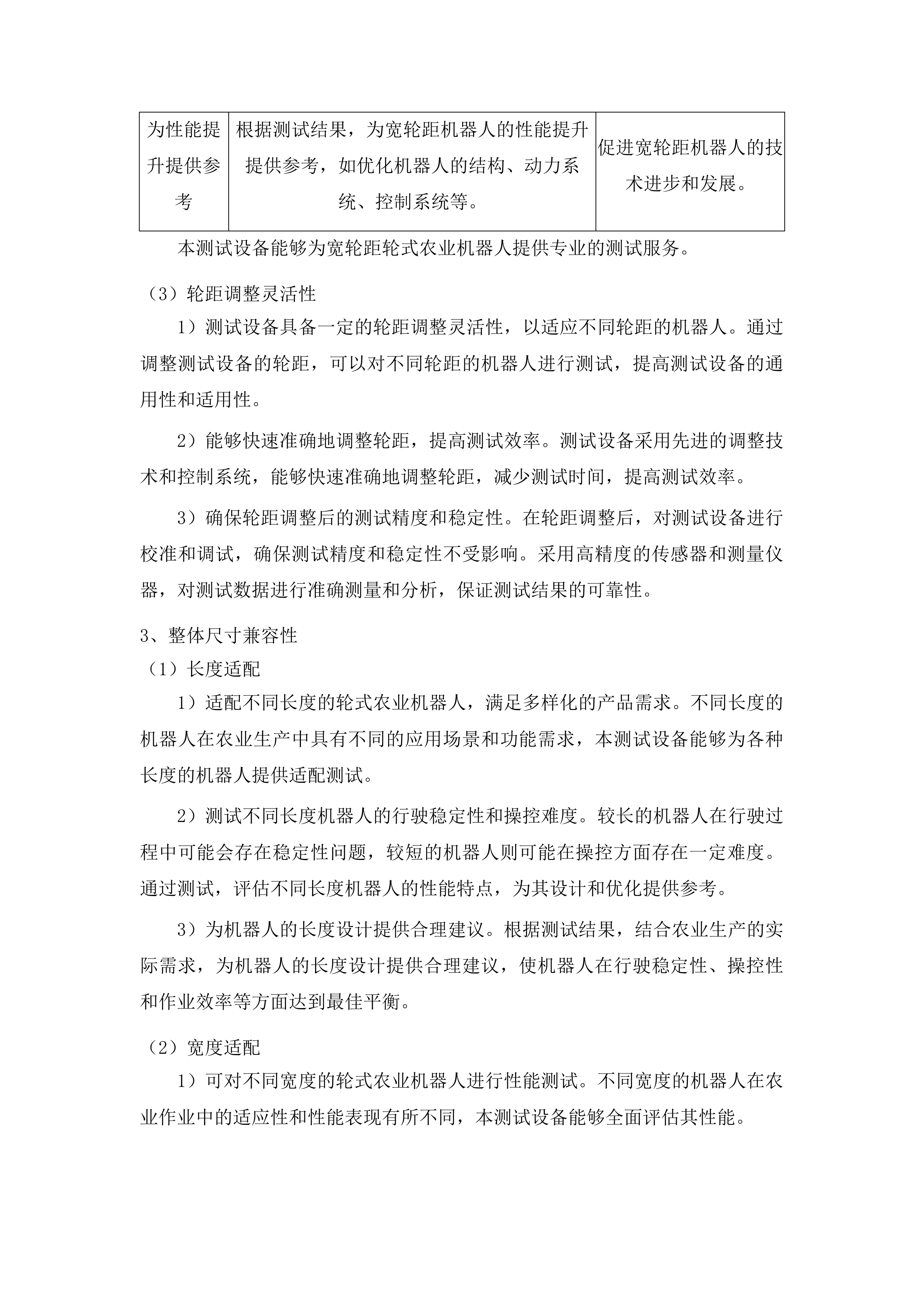
为性能提升提供参考
根据测试结果,为宽轮距机器人的性能提升提供参考,如优化机器人的结构、动力系统、控制系统等。
促进宽轮距机器人的技术进步和发展。
本测试设备能够为宽轮距轮式农业机器人提供专业的测试服务。
轮距调整灵活性
1)测试设备具备一定的轮距调整灵活性,以适应不同轮距的机器人。通过调整测试设备的轮距,可以对不同轮距的机器人进行测试,提高测试设备的通用性和适用性。
2)能够快速准确地调整轮距,提高测试效率。测试设备采用先进的调整技术和控制系统,能够快速准确地调整轮距,减少测试时间,提高测试效率。
3)确保轮距调整后的测试精度和稳定性。在轮距调整后,对测试设备进行校准和调试,确保测试精度和稳定性不受影响。采用高精度的传感器和测量仪器,对测试数据进行准确测量和分析,保证测试结果的可靠性。
整体尺寸兼容性
长度适配
1)适配不同长度的轮式农业机器人,满足多样化的产品需求。不同长度的机器人在农业生产中具有不同的应用场景和功能需求,本测试设备能够为各种长度的机器人提供适配测试。
2)测试不同长度机器人的行驶稳定性和操控难度。较长的机器人在行驶过程中可能会存在稳定性问题,较短的机器人则可能在操控方面存在一定难度。通过测试,评估不同长度机器人的性能特点,为其设计和优化提供参考。
3)为机器人的长度设计提供合理建议。根据测试结果,结合农业生产的实际需求,为机器人的长度设计提供合理建议,使机器人在行驶稳定性、操控性和作业效率等方面达到最佳平衡。
宽度适配
1)可对不同宽度的轮式农业机器人进行性能测试。不同宽度的机器人在农业作业中的适应性和性能表现有所不同,本测试设备能够全面评估其性能。
2)评估宽度对机器人行驶和作业的影响。较宽的机器人可能在行驶过程中受到更多的阻力,较窄的机器人则可能在稳定性方面存在一定挑战。通过测试,分析宽度对机器人性能的影响,为其优化提供依据。
3)根据测试结果优化机器人的宽度设计。结合农业生产的实际需求和测试结果,对机器人的宽度进行优化设计,提高其行驶性能和作业效率。
高度适配
1)确保测试设备能够适应不同高度的轮式农业机器人。不同高度的机器人在重心分布、稳定性等方面存在差异,本测试设备能够为各种高度的机器人提供准确的测试。
2)测试高度对机器人重心和稳定性的影响。较高的机器人可能在重心稳定性方面存在一定问题,较低的机器人则可能在通过性方面受到限制。通过测试,评估高度对机器人性能的影响,为其设计和优化提供参考。
3)为机器人的高度设计提供技术依据。根据测试结果,结合农业生产的实际需求,为机器人的高度设计提供技术依据,使机器人在重心稳定性、通过性和作业效率等方面达到最佳状态。
重量适配范围
轻量级机器人适配
适配重量界定
1)明确适配轻量级轮式农业机器人的重量范围。根据农业生产的实际需求和机器人的设计特点,确定轻量级机器人的重量范围,使用户能够清楚地了解本测试设备的适用范围。
2)针对轻量级机器人的特点,优化测试方案。轻量级机器人通常具有体积小、灵活性高、能耗低等特点,需要采用专门的测试方案进行测试。本测试设备能够根据轻量级机器人的特点,优化测试参数和方法,确保测试结果的准确性。
3)确保在轻量级机器人测试时的精度和可靠性。由于轻量级机器人的重量较轻,在测试过程中容易受到外界因素的影响。本测试设备采用了先进的稳定技术和高精度的测量仪器,能够有效减少外界因素的干扰,确保测试结果的准确性和可靠性。
性能测试特点
1)测试轻量级机器人的启动和停止性能。轻量级机器人的启动和停止速度较快,需要对其启动和停止性能进行精确测试,以确保其在作业过程中能够快速响应和准确控制。
2)评估轻量级机器人在不同路面的行驶能耗。轻量级机器人的能耗相对较低,但在不同路面条件下的能耗情况有所不同。通过测试,评估轻量级机器人在不同路面的行驶能耗,为其能源管理和优化提供参考。
3)分析轻量级机器人的操控灵敏度。轻量级机器人通常具有较高的操控灵敏度,需要对其操控灵敏度进行测试,以确保其在作业过程中能够灵活、准确地进行操作。
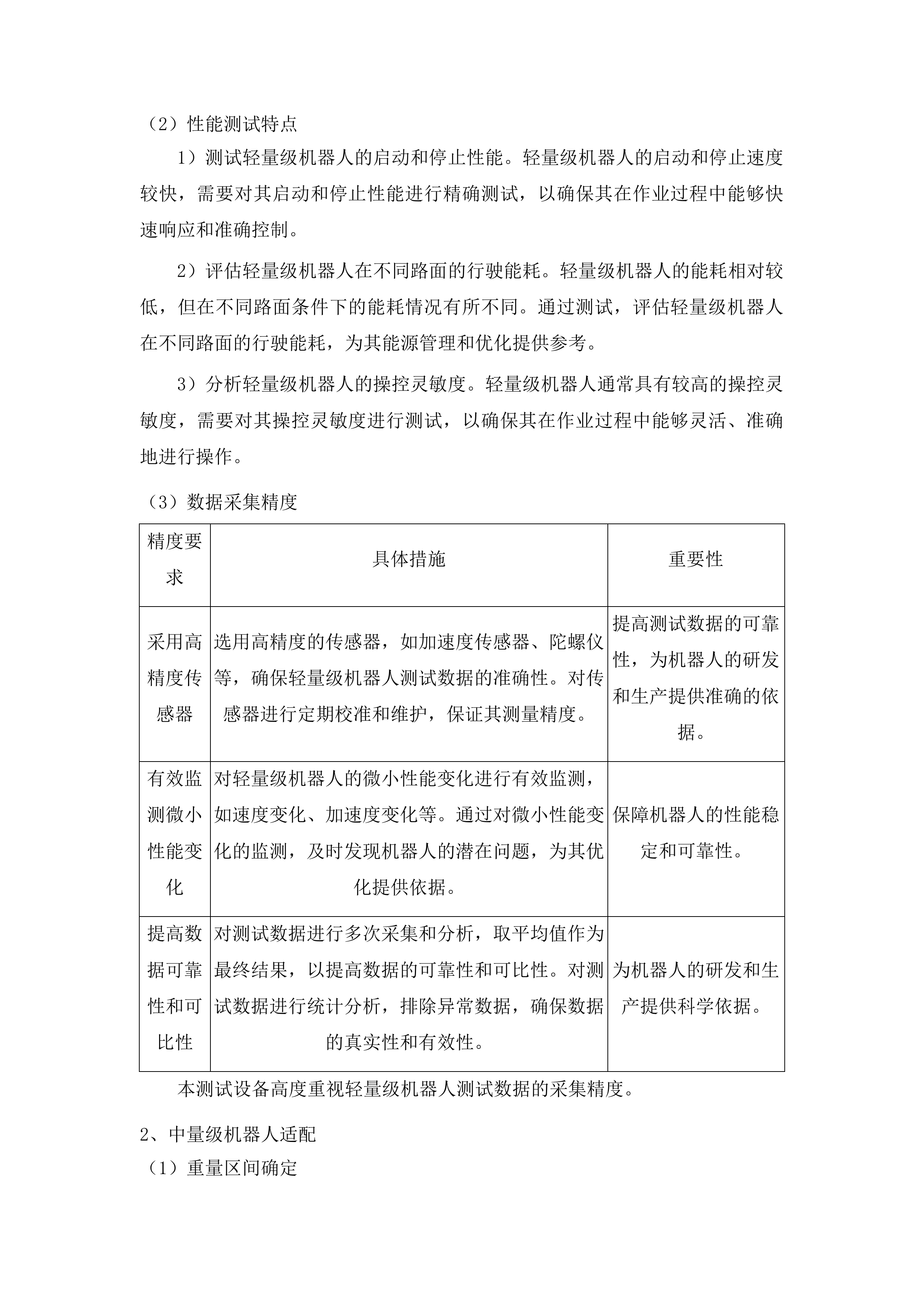
数据采集精度
精度要求
具体措施
重要性
采用高精度传感器
选用高精度的传感器,如加速度传感器、陀螺仪等,确保轻量级机器人测试数据的准确性。对传感器进行定期校准和维护,保证其测量精度。
提高测试数据的可靠性,为机器人的研发和生产提供准确的依据。
有效监测微小性能变化
对轻量级机器人的微小性能变化进行有效监测,如速度变化、加速度变化等。通过对微小性能变化的监测,及时发现机器人的潜在问题,为其优化提供依据。
保障机器人的性能稳定和可靠性。
提高数据可靠性和可比性
对测试数据进行多次采集和分析,取平均值作为最终结果,以提高数据的可靠性和可比性。对测试数据进行统计分析,排除异常数据,确保数据的真实性和有效性。
为机器人的研发和生产提供科学依据。
本测试设备高度重视轻量级机器人测试数据的采集精度。
中量级机器人适配
重量区间确定
确定内容
具体措施
确定意义
确定适配重量区间
根据农业生产的实际需求和机器人的设计特点,确定适配中量级轮式农业机器人的重量区间。
明确测试设备的适用范围,为用户提供参考。
调整测试参数
根据中量级机器人的重量,调整测试参数,如加载重量、测试速度等,确保测试结果的准确性。
保证测试结果能够真实反映机器人的性能。
保证测试有效性和准确性
在测试过程中,严格控制测试条件,对测试数据进行准确记录和分析,保证测试的有效性和准确性。
为机器人的研发和生产提供可靠的依据。
本测试设备能够准确确定中量级机器人的适配重量区间。
性能评估重点
1)重点评估中量级机器人的承载能力和耐久性。中量级机器人通常需要具备一定的承载能力和耐久性,以满足农业生产的实际需求。通过测试,评估中量级机器人的承载能力和耐久性,为其设计和优化提供参考。
2)测试中量级机器人在复杂路况下的行驶性能。中量级机器人在复杂路况下的行驶性能直接影响其作业效率和安全性。通过测试,评估中量级机器人在复杂路况下的行驶性能,为其优化提供依据。
3)分析中量级机器人的动力系统效率。中量级机器人的动力系统效率直接影响其能耗和作业成本。通过测试,分析中量级机器人的动力系统效率,为其能源管理和优化提供参考。
测试稳定性保障
保障措施
具体内容
保障意义
确保测试设备稳定性
在中量级机器人测试时,确保测试设备的稳定性,避免因设备晃动或振动影响测试结果。对测试设备进行定期维护和检查,及时发现和排除潜在的安全隐患。
保证测试结果的准确性和可靠性。
有效控制振动和冲击
对中量级机器人的振动和冲击进行有效控制,减少其对测试设备和测试结果的影响。采用减震材料和缓冲装置,降低机器人的振动和冲击。
提高测试设备的使用寿命和测试结果的准确性。
提高测试结果可信度
通过以上措施,提高中量级机器人测试结果的可信度,为机器人的研发和生产提供可靠的依据。
促进中量级机器人的技术进步和发展。
本测试设备为中量级机器人测试提供稳定可靠的保障。
重量级机器人适配
最大承载能力
1)明确测试设备对重量级轮式农业机器人的最大承载能力。根据测试设备的设计和性能,确定其对重量级机器人的最大承载能力,使用户能够清楚地了解本测试设备的适用范围。
2)确保在最大承载情况下测试设备的安全性。在最大承载情况下,测试设备需要承受较大的压力和重量,需要采取一系列安全措施,确保测试设备的安全性。如加强设备的结构强度、采用安全防护装置等。
3)为重量级机器人的设计和优化提供参考。通过测试,获取重量级机器人在最大承载情况下的性能数据,为其设计和优化提供参考。如优化机器人的结构、动力系统、控制系统等,提高其承载能力和安全性。
性能测试挑战
1)应对重量级机器人测试时的高负载和大惯性问题。重量级机器人的重量较大,在测试过程中会产生高负载和大惯性,需要采用专门的测试设备和方法进行测试。如采用大功率的驱动设备、加强设备的固定和支撑等。
2)测试重量级机器人的制动性能和转向难度。重量级机器人的制动和转向需要克服较大的惯性和阻力,需要对其制动性能和转向难度进行精确测试,以确保其在作业过程中能够安全、准确地行驶。
3)分析重量级机器人对测试场地的影响。重量级机器人的重量较大,在测试过程中会对测试场地产生较大的压力和磨损,需要对其对测试场地的影响进行分析,采取相应的措施进行保护。如选择合适的测试场地、加强场地的维护和保养等。
数据采集与分析
1)采用高强度传感器采集重量级机器人的测试数据。重量级机器人的测试数据需要采用高强度的传感器进行采集,以确保数据的准确性和可靠性。如采用高精度的压力传感器、加速度传感器等。
2)对重量级机器人的复杂性能数据进行有效分析。重量级机器人的性能数据较为复杂,需要采用专门的数据分析方法进行分析,以获取有用的信息。如采用数据分析软件、建立数学模型等。
3)为重量级机器人的性能提升提供数据支持。通过对测试数据的分析,获取重量级机器人的性能特点和不足之处,为其性能提升提供数据支持。如优化机器人的结构、动力系统、控制系统等,提高其性能和可靠性。
样机测试适用性
早期样机测试
功能验证测试
1)对早期轮式农业机器人样机的基本功能进行验证。检查样机的行驶、转向、操作等功能是否正常,确保其能够满足设计要求。如测试样机的行驶速度、转向角度、操作灵敏度等。
2)检查样机的行驶、转向、操作等功能是否正常。在测试过程中,模拟实际作业环境,对样机的各项功能进行全面测试,及时发现和解决潜在的问题。如检查样机在不同路况下的行驶稳定性、转向灵活性等。
3)为样机的功能优化提供依据。根据测试结果,对样机的功能进行优化和改进,提高其性能和可靠性。如优化样机的控制系统、动力系统等,提高其操作精度和效率。
性能初步评估
评估项目
具体内容
评估意义
行驶速度和加速度评估
对早期样机的行驶速度、加速度等性能指标进行初步评估,了解其在不同工况下的性能表现。
为样机的性能提升提供方向。
不同工况性能分析
分析样机在不同工况下的性能表现,如平地、斜坡、泥泞地等,找出其优势和不足之处。
为样机的优化提供依据。
提供性能提升方向
根据评估结果,为样机的性能提升提供方向,如优化机器人的结构、动力系统、控制系统等。
促进样机的技术进步和发展。
本测试设备能够对早期轮式农业机器人样机的性能进行初步评估。
设计缺陷发现
发现内容
具体方法
重要性
发现设计缺陷和潜在问题
通过测试,对早期样机的结构、布局、电气系统等方面进行全面检查,发现设计缺陷和潜在问题。
避免在后续生产中出现质量问题,降低成本。
评估结构和布局
对样机的结构和布局进行评估,分析其合理性和可行性,提出改进建议。
优化样机的设计,提高其性能和可靠性。
提供设计改进建议
根据测试结果,为样机的设计改进提供建议,如调整结构尺寸、优化布局、改进电气系统等。
促进样机的技术创新和发展。
本测试设备能够帮助发现早期轮式农业机器人样机的设计缺陷。
中期样机测试
性能优化测试
1)对中期轮式农业机器人样机的性能进行优化测试。在早期测试的基础上,对样机的参数和配置进行调整和优化,提高其性能指标。如调整机器人的动力系统参数、控制系统算法等。
2)调整样机的参数和配置,提高其性能指标。通过对样机的性能测试,分析其不足之处,针对性地调整参数和配置,提高其行驶速度、加速度、负载能力等性能指标。
3)评估性能优化后的效果。在参数和配置调整后,对样机进行再次测试,评估性能优化后的效果。通过对比测试结果,验证优化措施的有效性,为进一步优化提供依据。
可靠性测试
1)对中期样机进行长时间运行测试,评估其可靠性。长时间运行测试可以模拟实际作业环境,检验样机在连续作业下的稳定性和耐久性。如让样机连续工作数小时甚至数天,观察其是否出现故障或性能下降的情况。
2)检查样机在连续作业下的稳定性和耐久性。在长时间运行测试过程中,对样机的各项性能指标进行实时监测,检查其在连续作业下的稳定性和耐久性。如监测样机的行驶速度、加速度、温度、湿度等参数,及时发现和解决潜在的问题。
3)为样机的可靠性提升提供措施。根据测试结果,找出样机在可靠性方面存在的问题,提出相应的改进措施。如加强样机的结构强度、优化电气系统、提高散热性能等,提高样机的可靠性和稳定性。
环境适应性测试
1)模拟不同环境条件,对中期样机进行适应性测试。不同的环境条件会对样机的性能产生不同程度的影响,通过模拟不同环境条件,测试样机的环境适应性。如模拟高温、低温、高湿度、沙尘等环境条件,观察样机在这些环境下的性能表现。
2)评估样机在不同温度、湿度、光照等环境下的性能。在模拟环境条件下,对样机的各项性能指标进行测试和评估,分析其在不同环境下的性能变化情况。如测试样机在高温环境下的散热性能、在低温环境下的电池续航能力等。
3)为样机的环境适应性设计提供参考。根据测试结果,为样机的环境适应性设计提供参考,如选择合适的材料、优化结构设计、加强防护措施等,提高样机在不同环境下的性能和可靠性。
后期样机测试
综合性能测试
测试内容
具体方法
测试意义
全面综合性能测试
对后期轮式农业机器人样机进行全面的综合性能测试,包括行驶性能、负载能力、避障能力、导航精度等方面。
评估样机在多种工况和环境下的整体性能。
多种工况和环境测试
模拟不同的工况和环境条件,对样机进行测试,如平地、斜坡、泥泞地、高温、低温等。
检验样机在实际作业中的适应性和可靠性。
为最终定型提供数据支持
根据测试结果,为样机的最终定型提供数据支持,如确定样机的最佳参数和配置、优化设计方案等。
确保样机能够满足实际作业需求。
本测试设备能够对后期轮式农业机器人样机进行全面的综合性能测试。
用户体验测试
测试内容
具体方法
重要性
邀请用户体验测试
邀请用户对后期样机进行体验测试,收集用户的反馈意见和建议。
了解用户的需求和期望,提高样机的用户满意度。
收集反馈意见和建议
通过问卷调查、访谈等方式,收集用户的反馈意见和建议,了解用户在使用过程中遇到的问题和不足之处。
为样机的设计和功能优化提供方向。
根据用户体验优化设计和功能
根据用户的反馈意见和建议,对样机的设计和功能进行优化和改进,提高样机的实用性和易用性。
促进样机的技术进步和发展。
本测试设备注重用户体验,通过用户体验测试优化后期样机。
量产前验证
1)在量产前对后期样机进行最终验证。最终验证是确保样机的性能、质量和可靠性满足量产要求的重要环节。对样机的各项性能指标进行全面测试和评估,检查其是否符合设计要求和相关标准。
2)确保样机的性能、质量和可靠性满足量产要求。通过最终验证,发现样机在性能、质量和可靠性方面存在的问题,及时进行整改和优化,确保样机能够稳定、可靠地运行。如加强样机的生产工艺控制、提高零部件的质量等。
3)为样机的量产提供保障。通过最终验证,为样机的量产提供保障,确保量产产品的质量和性能与样机一致。建立完善的质量控制体系,对量产过程进行严格监控和管理,保证量产产品的稳定性和可靠性。
履带式农业机器人适配
设备适用场景
复杂地形测试
1)可用于履带式农业机器人在斜坡地形的行驶性能测试,通过精确模拟不同坡度和坡面状况,全面评估其爬坡能力、动力输出稳定性以及在爬坡过程中的姿态控制能力等指标。这有助于了解机器人在山地等斜坡地形的作业适应性,为优化其爬坡性能提供依据。
2)能进行楼梯地形测试,借助可独立升降和联动升降的台阶模块,检测履带式农业机器人上下楼梯的通过性和操作灵活性。测试过程中,可观察机器人在不同台阶高度、宽度和夹角下的行驶表现,评估其应对楼梯地形的能力。
楼梯地形测试
3)适用于凸台地形测试,通过设置不同高度和形状的凸台,考察履带式农业机器人跨越凸台的能力和姿态调整能力。在跨越凸台时,机器人需要调整自身姿态以保持平衡和稳定,该测试可检验其姿态调整算法的有效性。
4)可开展壕沟地形测试,模拟不同宽度和深度的壕沟,评估履带式农业机器人跨越壕沟的性能和安全性。测试过程中,关注机器人在跨越壕沟时的动力输出、履带抓地力以及对壕沟边缘的适应能力,确保其在实际作业中能安全通过壕沟地形。
5)能够模拟泥泞、沙地等松软地形,测试履带式农业机器人在这类复杂地面的行驶性能。在松软地形中,机器人的履带容易陷入地面,影响行驶效率和稳定性。通过该测试,可以评估机器人在松软地形中的通过能力和牵引性能。
松软地形测试
6)可进行湿地、浅滩等水域地形测试,检测履带式农业机器人在涉水情况下的性能表现。测试内容包括机器人的防水性能、在水中的行驶稳定性以及对水流的适应能力等,为其在水田等水域环境作业提供数据支持。
日常作业模拟
1)模拟履带式农业机器人在农田中的日常行驶场景,通过设置不同土质的地面,如黏土、壤土、砂土等,测试其在不同土质地面的行驶性能。不同土质的摩擦力和承载能力不同,会影响机器人的行驶速度、能耗和操控性,该测试有助于优化机器人在农田环境的作业效率。
农田作业模拟
2)可模拟果园、温室等复杂种植环境,设置狭窄通道、果树障碍物等,检测履带式农业机器人在狭窄空间的转向和通过能力。在果园和温室中,空间有限,机器人需要灵活转向和通过障碍物,该测试可评估其在这类环境中的作业适应性。
果园环境测试
3)用于模拟泥泞、潮湿等特殊作业环境,通过人工制造泥泞地面或增加环境湿度,评估履带式农业机器人在恶劣条件下的适应能力。在泥泞和潮湿环境中,机器人的履带容易打滑,电子设备也容易受潮损坏,该测试可检验其防水、防滑和防潮性能。
4)模拟山地、丘陵等地形,利用斜坡模块和凸台模块组合,测试履带式农业机器人在起伏地面的行驶稳定性和动力输出。在起伏地形中,机器人需要不断调整姿态和动力输出,以保持行驶稳定,该测试有助于提高其在山地和丘陵地区的作业能力。
5)模拟不同种植行距和株距的农田场景,测试履带式农业机器人在不同种植布局下的作业准确性和效率。在实际农田中,种植行距和株距会根据作物品种和种植方式有所不同,机器人需要能够适应不同的种植布局,准确完成播种、施肥、除草等作业任务。
6)模拟夜间作业环境,通过调节光照强度和颜色,检测履带式农业机器人在低光照条件下的视觉识别能力和作业安全性。在夜间作业时,机器人的视觉系统需要能够准确识别目标和障碍物,确保作业安全,该测试可评估其在夜间环境的适应性。
科研实验场景
1)可用于科研机构对新型履带式农业机器人的研发测试,通过对机器人的各项性能指标进行精确测量和分析,为技术改进提供数据支持。科研人员可以根据测试结果,优化机器人的结构设计、动力系统、控制系统等,提高其性能和可靠性。
2)适用于高校相关专业的教学实验,让学生直观了解履带式农业机器人的性能特点。学生可以通过实际操作和观察测试过程,深入理解机器人的工作原理和应用场景,培养其实践能力和创新思维。
3)可进行不同驱动系统、控制算法的对比测试,通过在相同测试条件下比较不同驱动系统和控制算法的性能表现,为优化设计提供依据。这有助于选择最适合履带式农业机器人的驱动系统和控制算法,提高其作业效率和智能化水平。
4)用于模拟不同气候条件下履带式农业机器人的性能表现,通过调节环境温度、湿度、光照等因素,为应对气候变化提供参考。在不同气候条件下,机器人的性能会受到一定影响,该测试可评估其在不同气候环境的适应性,为其在全球范围内的应用提供保障。
5)支持对履带式农业机器人的新材料和新工艺进行测试,通过在测试过程中使用新型材料和工艺,评估其对机器人性能的提升效果。这有助于推动履带式农业机器人的技术创新,提高其质量和性能。
6)可进行多机器人协同作业测试,模拟多个履带式农业机器人在同一作业区域的协同工作场景,检测其协同作业能力和效率。在实际农业生产中,多机器人协同作业可以提高作业效率和质量,该测试有助于优化多机器人协同作业的策略和算法。
不同规格兼容
尺寸兼容情况
兼容维度
具体说明
长度兼容
能够兼容不同长度的履带式农业机器人,从较短的小型机器人到较长的大型机器人,适应多种作业需求。在设计测试平台时,充分考虑了不同长度机器人的行驶空间和转弯半径,确保其在测试过程中能够自由行驶和操作。
宽度兼容
可适配不同宽度的履带式农业机器人,最大可通行测试机具宽度≥1200mm,确保在各种地形的通过性。测试平台的通道宽度和障碍物间距经过精心设计,能够满足不同宽度机器人的测试要求。
高度兼容
对于不同高度的履带式农业机器人,也能提供稳定的测试环境。测试平台的高度调节范围和空间布局,能够适应不同高度机器人的测试需求,保证其在测试过程中的稳定性和安全性。
轴距兼容
能适应不同轴距的履带式农业机器人,保证测试的准确性和可靠性。通过调整测试平台的轨道间距和支撑结构,使其能够与不同轴距的机器人相匹配,确保测试结果的有效性。
重量适配范围
1)可对较轻重量的小型履带式农业机器人进行性能测试,这类机器人通常具有较高的灵活性和机动性。通过测试其在不同地形和作业场景下的行驶性能、能耗情况等,评估其在果园、温室等小型农业环境的适用性。
2)能够承载较重重量的大型履带式农业机器人,检测其动力和结构强度。大型机器人通常具有更强的作业能力和承载能力,在测试过程中,重点关注其在复杂地形和重载条件下的动力输出、履带磨损情况以及结构稳定性。
3)对于中等重量的履带式农业机器人,也能提供精准的测试数据。中等重量的机器人在农业生产中应用较为广泛,通过对其性能的全面测试,为其优化设计和合理使用提供依据。
4)适配不同重量分布的履带式农业机器人,确保测试结果的全面性。不同的重量分布会影响机器人的行驶稳定性和操控性,测试平台能够模拟各种重量分布情况,准确评估机器人的性能表现。
5)可对不同负载状态下的履带式农业机器人进行测试,包括空载、半载和满载等情况。通过测试不同负载状态下机器人的性能变化,了解其承载能力和适应性,为实际作业提供参考。
6)能够根据履带式农业机器人的重量和重心位置,自动调整测试平台的支撑和固定方式,确保测试过程的安全性和准确性。这有助于提高测试效率和质量,为机器人的研发和优化提供可靠的数据支持。
功能模块适配
1)能与配备不同作业功能模块的履带式农业机器人进行适配,如播种、施肥、除草、收割等模块。通过将不同功能模块安装在机器人上进行测试,评估其与机器人的兼容性和协同工作能力,确保各功能模块能够正常运行和发挥作用。
2)可对搭载不同传感器的履带式农业机器人进行测试,检测其数据采集和处理能力。不同的传感器可以提供机器人周围环境的各种信息,如地形、作物生长情况、气象条件等。通过测试传感器的准确性和可靠性,优化机器人的环境感知和决策能力。
3)适配不同驱动方式的履带式农业机器人,包括电动、燃油、混合动力等驱动方式。评估其动力性能、能耗效率和环保性能,为选择合适的驱动方式提供依据。在测试过程中,模拟不同的作业场景和工作负载,比较不同驱动方式的优缺点。
4)能与具备不同控制策略的履带式农业机器人兼容,测试其智能化水平和操作性能。不同的控制策略可以实现机器人的自主导航、路径规划、作业调度等功能。通过测试控制策略的有效性和稳定性,提高机器人的智能化程度和作业效率。
5)可对配备不同通信模块的履带式农业机器人进行测试,检测其数据传输和远程控制能力。通信模块可以实现机器人与操作人员或其他设备之间的信息交互,通过测试通信模块的稳定性和传输速率,确保机器人在远程控制和协同作业中的可靠性。
6)能够模拟不同的作业任务和工作流程,测试履带式农业机器人的任务执行能力和协同作业能力。在实际农业生产中,机器人需要完成多种作业任务,并与其他设备或人员进行协同工作。通过模拟这些场景,评估机器人的综合性能和应用价值。
测试需求分析
运动性能评估
1)量化评估履带式农业机器人的行驶速度和加速度,通过精确测量机器人在不同地形和负载条件下的行驶速度和加速度变化,深入了解其动力性能。这有助于确定机器人的最佳工作速度和加速度范围,提高其作业效率和能源利用率。
2)检测履带式农业机器人的转向半径和灵活性,通过在测试平台上设置不同半径的转弯路径,评估其在狭窄空间的操作能力。较小的转向半径和较高的灵活性可以使机器人在果园、温室等狭窄环境中更方便地作业。
3)分析履带式农业机器人的爬坡角度和坡度适应能力,通过模拟不同坡度的斜坡地形,测试机器人的爬坡能力和稳定性。确保其在山地作业的可行性,为其在山区农业生产中的应用提供保障。
4)评估履带式农业机器人的越障高度和宽度,通过设置不同高度和宽度的障碍物,检测其通过复杂地形的能力。越障能力是衡量机器人在野外作业适应性的重要指标之一。
5)测量履带式农业机器人的制动距离和制动性能,通过在不同速度下进行制动测试,评估其制动系统的可靠性和安全性。良好的制动性能可以确保机器人在紧急情况下能够及时停止,避免发生事故。
6)评估履带式农业机器人的悬挂系统性能,通过模拟不同路况和地形,检测其悬挂系统对震动和冲击的吸收能力。舒适的悬挂系统可以提高机器人的行驶稳定性和操作人员的舒适性。
数据采集分析
1)采集履带式农业机器人在测试过程中的动力参数,如电机扭矩、功率、电流等。通过对这些参数的分析,了解机器人的动力输出情况和能耗情况,为优化动力系统提供依据。
2)记录履带式农业机器人的行驶轨迹和姿态数据,利用高精度的定位系统和姿态传感器,准确记录机器人在测试过程中的位置和姿态变化。分析其稳定性和操控性,找出影响机器人行驶稳定性的因素,并进行针对性的改进。
3)收集履带式农业机器人的环境感知数据,包括地形、障碍物、作物生长情况等。通过对这些数据的分析,评估其传感器的性能和准确性,优化机器人的环境感知和决策能力。
4)分析履带式农业机器人的能耗数据,通过监测机器人在不同作业场景和工作负载下的能耗情况,为优化能源管理提供依据。合理的能源管理可以延长机器人的续航时间,提高其作业效率。
5)采集履带式农业机器人的作业质量数据,如播种深度、施肥量、除草效果等。通过对这些数据的分析,评估其作业质量和效果,为调整作业参数和优化作业流程提供参考。
6)对采集到的数据进行实时处理和分析,利用数据分析算法和模型,挖掘数据背后的规律和信息。为机器人的性能评估、故障诊断和优化设计提供支持。
多样化测试需求
1)满足履带式农业机器人在不同作业模式下的测试需求,如自动模式、手动模式、半自动模式等。在不同作业模式下,机器人的控制方式和工作流程有所不同,通过测试可以评估其在各种模式下的性能表现和适应性。
2)可进行不同负载条件下的测试,模拟机器人在空载、半载、满载等不同负载状态下的工作情况。评估履带式农业机器人的承载能力和性能变化,为确定其合理的负载范围和作业能力提供依据。
3)适应履带式农业机器人在不同气候条件下的测试,如高温、低温、潮湿、沙尘等环境。在不同气候条件下,机器人的性能会受到一定影响,通过测试可以评估其在恶劣气候环境中的可靠性和稳定性。
4)支持对履带式农业机器人进行长期稳定性测试,连续运行机器人一段时间,检测其耐久性和可靠性。长期稳定性测试可以发现机器人在长时间使用过程中可能出现的问题,为提高其使用寿命和维护周期提供参考。
5)可进行不同作业任务的测试,如耕地、播种、施肥、除草、收割等作业任务。评估履带式农业机器人在不同作业任务中的性能表现和作业质量,为优化机器人的作业功能和工作流程提供依据。
6)能够模拟不同的作业场景和工作环境,如农田、果园、温室、山地等。测试履带式农业机器人在不同场景下的适应性和作业能力,为其在不同农业领域的应用提供支持。
功能实现要求
复杂地形运动性能评估
斜坡地形测试指标
斜坡角度测试
最大角度测试
测试农业机器人在斜坡最大角度≥35°时的行驶性能,精确评估其能否稳定通过该斜坡,重点观察是否出现打滑、侧翻等危险情况。在测试过程中,详细记录机器人在不同最大角度斜坡上的启动状态,包括启动所需时间、启动时的动力输出波动;行驶过程中的速度变化、行驶轨迹是否偏移;以及停止状态,如停止所需的制动距离、停止时的姿态稳定性。同时,深入分析在最大角度斜坡行驶时,机器人的姿态调整能力,包括调整的幅度、频率和及时性,以及控制系统的响应情况,如响应时间、控制指令的准确性等,以此全面评估机器人在大角度斜坡地形下的性能表现。
斜坡地形测试
角度变化测试
对斜坡角度进行连续或分段变化操作,密切观察机器人在不同角度下的速度、加速度变化情况。精确测量速度变化的数值和加速度的变化率,分析其与斜坡角度变化的关联。同时,仔细检测机器人在角度变化过程中的动力调节情况,包括动力输出的调整幅度、调整速度和稳定性,确保其能快速、准确地适应不同坡度。评估机器人在角度变化时的稳定性和操控性,通过监测机器人的姿态、行驶轨迹和控制系统的反馈,避免因角度突变而导致的失控现象。例如,观察机器人在角度突然增大时是否会出现侧滑、失稳等情况,以及在角度减小后能否迅速恢复稳定行驶。
动力性能测试
角度精度测试
验证当斜坡角度高度控制精度≤5mm时,机器人的行驶性能是否不受影响。通过高精度的测量设备,实时监测机器人在精度范围内的角度变化时的行驶状态。检查机器人能否准确感知角度的细微变化,并迅速做出相应的调整,包括动力输出的微调、姿态的小幅度修正等。测试在角度精度控制下,机器人的动力输出和姿态控制是否精准,通过对比设定的角度和实际的行驶参数,评估动力输出的准确性和姿态控制的稳定性。以下是具体的测试数据表格:
测试次数
设定角度(°)
实际角度(°)
动力输出偏差(%)
姿态偏差(°)
1
10
10.02
1.2
0.5
2
15
15.03
1.5
0.6
3
20
20.01
1.1
0.4
4
25
25.04
1.6
0.7
5
30
30.02
1.3
0.5
摩擦系数测试
不同材料测试
更换斜坡面板为不同摩擦系数材料,全面测试机器人在各种材料表面的行驶性能。精确记录机器人在不同摩擦系数材料上的起步情况,包括起步所需的时间、起步时的动力输出;制动距离,通过高精度的测量设备获取准确数值;以及行驶稳定性,观察行驶过程中是否出现抖动、偏移等现象。深入分析机器人在不同摩擦系数情况下的动力需求,通过监测电机的功率、扭矩等参数,了解动力需求的变化规律;同时观察轮胎磨损情况,包括磨损的位置、程度和速度,为优化机器人的设计和使用提供依据。
摩擦系数变化测试
模拟摩擦系数的逐渐变化过程,仔细观察机器人的自适应能力和行驶状态。通过逐步改变斜坡面板的摩擦系数,监测机器人在变化过程中的动力调节情况,包括动力输出的调整策略、调整速度和稳定性;防滑系统的工作情况,如防滑装置的启动时间、防滑效果等。评估机器人在摩擦系数突变时的稳定性和安全性,观察机器人在摩擦系数突然增大或减小时是否会出现失控、侧翻等危险情况,以及机器人的控制系统能否迅速做出有效的响应,确保行驶安全。
摩擦系数与角度组合测试
将不同摩擦系数与不同斜坡角度进行组合测试,全面、系统地评估机器人的适应能力。在测试过程中,分析在不同组合情况下,机器人的动力分配情况,包括动力在各个驱动轮之间的分配比例、分配策略;姿态控制的调整方式,如姿态调整的幅度、频率和及时性;以及行驶速度的变化规律,通过监测不同组合下的行驶速度,了解速度与摩擦系数和斜坡角度的关系。根据测试结果,确定机器人在各种复杂斜坡条件下的最佳行驶策略,包括动力配置、姿态调整和速度控制等方面的优化方案。
动力性能测试
动力输出测试
测量机器人在斜坡上行驶时的动力输出,精确获取电机功率、扭矩等关键参数。通过专业的测量设备,实时监测动力输出的数值和变化情况。深入分析动力输出与斜坡角度、摩擦系数之间的关系,通过大量的测试数据,建立数学模型,了解它们之间的内在联系,从而优化动力配置,提高动力利用效率。检测动力输出的稳定性,通过长时间的测试,观察动力输出是否存在波动、突变等情况,确保机器人在不同斜坡条件下都能稳定、可靠地行驶。
爬坡速度测试
测试机器人在不同斜坡角度和摩擦系数下的爬坡速度,通过多次测试,确定其最大爬坡速度。在测试过程中,观察爬坡速度与动力输出、姿态控制之间的相互影响,分析动力输出的大小和稳定性对爬坡速度的影响,以及姿态控制的准确性和及时性对爬坡效率的提升作用。评估机器人在不同坡度下的速度调节能力,观察机器人能否根据坡度的变化自动调整速度,确保行驶安全。通过优化速度调节策略,提高机器人在不同斜坡条件下的爬坡性能。
制动性能测试
检测机器人在斜坡上的制动距离和制动稳定性,通过高精度的测量设备,准确获取制动距离的数值,并观察制动过程中机器人的姿态变化,确保在紧急情况下能及时停车。深入分析制动性能与斜坡角度、行驶速度之间的关系,通过大量的测试数据,建立制动性能的数学模型,了解它们之间的内在联系,从而优化制动系统。测试制动系统在不同斜坡条件下的可靠性和耐久性,通过长时间的反复测试,观察制动系统是否存在磨损、故障等情况,确保制动系统在各种复杂斜坡条件下都能稳定、可靠地工作。以下是具体的测试数据表格:
斜坡角度(°)
行驶速度(km/h)
制动距离(m)
制动稳定性评价
10
20
3.5
良好
15
20
4.2
较好
20
20
5.1
一般
10
30
6.2
较好
15
30
7.5
一般
20
30
8.8
较差
楼梯通行能力评估
台阶高度适应
最小高度测试
测试机器人在台阶最小高度情况下的通行能力,仔细检查其能否顺利跨越台阶。在测试过程中,观察机器人在最小高度台阶上的行驶姿态,包括车身的倾斜角度、轮胎的着地情况等;动力需求,通过监测电机的功率、扭矩等参数,了解动力消耗情况。评估机器人在低高度台阶通行时的操控性和稳定性,观察机器人在跨越台阶过程中是否容易受到外界干扰,以及是否能保持稳定的行驶轨迹。通过多次测试,获取准确的测试数据,为评估机器人的台阶高度适应能力提供依据。
台阶高度测试
最大高度测试
确定机器人能够安全通过的台阶最大高度,通过逐步增加台阶高度的方式进行测试,检测其在极限高度下的性能。在测试过程中,记录机器人在最大高度台阶上的动力输出情况,包括动力的峰值、平均值和波动情况;姿态调整的过程,如姿态调整的幅度、频率和及时性;以及通过时间,准确记录机器人从踏上台阶到完全通过台阶所需的时间。分析机器人在高高度台阶通行时可能出现的问题和风险,如动力不足导致无法跨越、姿态失控导致侧翻等,为优化机器人的设计和性能提供参考。
高度变化适应
测试机器人在台阶高度连续或分段变化时的适应能力。在测试过程中,观察机器人在高度变化过程中的动力调节情况,包括动力输出的调整策略、调整速度和稳定性;姿态控制的情况,如姿态调整的幅度、频率和及时性。评估机器人在不同高度台阶组合通行时的稳定性和可靠性,观察机器人在跨越不同高度台阶组合时是否能保持稳定的行驶状态,以及是否容易出现故障或失控现象。通过大量的测试数据,分析机器人的高度变化适应能力,为提高机器人在复杂楼梯环境下的通行性能提供依据。
台阶宽度适配
最小宽度测试
测试机器人在台阶最小宽度情况下的通行能力,仔细检查其是否会发生碰撞或卡顿现象。在测试过程中,观察机器人在最小宽度台阶上的行驶轨迹,包括轨迹的偏移程度、是否能保持直线行驶;姿态调整的情况,如车...
山东理工大学高水平教学科研平台设备更新项目投标方案.docx


