


网衣附着物水下清除专用设备研制与工程示范采购项目(二次)
第一章 设计方案1
10
第一节 总体设计方案
10
一、 设备组成模块设计
10
二、 系统集成方案
22
三、 极端海况适应性
38
第二节 功能与应用场景分析
47
一、 极端海况功能需求
47
二、 典型应用场景
61
三、 效能指标分解
72
第三节 清洗工具设计方案
88
一、 机械结构设计
88
二、 材料选型方案
99
三、 驱动系统配置
110
第四节 控制系统与控制方式
124
一、 硬件架构设计
124
二、 软件控制逻辑
135
三、 人机交互方案
141
第五节 水下定位及路径规划
153
一、 多源融合定位
153
二、 误差补偿策略
164
三、 智能路径规划
175
第六节 结构优化方案
184
一、 水动力外形设计
184
二、 强度仿真验证
192
三、 可靠性提升措施
198
第七节 多模式作业方案
207
一、 海况分级策略
207
二、 网箱适配方案
216
三、 能源管理策略
224
第八节 污损状况精准识别
234
一、 视觉采集系统
234
二、 智能识别算法
241
三、 数据库建设
252
第二章 设计方案2
262
第一节 论文成果
262
一、 网衣附着物清除设备研究
262
二、 海洋牧场装备创新
272
第二节 发明专利
287
一、 水下清洗装置专利
287
二、 路径规划算法专利
299
第三节 标准制定
317
一、 海洋装备清洗规范
317
二、 水下机器人技术要求
328
第四节 科研项目
349
一、 现代化海洋牧场项目
349
二、 深海装备研发课题
365
第三章 测试方案1
377
第一节 测试目标
377
一、 设备性能指标验证
377
二、 水下越障能力测试
385
三、 结构稳定性验证
390
第二节 数据采集与分析计划
399
一、 运行状态参数采集
399
二、 关键性能数据分析
405
三、 数据处理与可视化
414
第三节 水池试验测试方法
424
一、 网箱模拟环境构建
425
二、 静水条件基础测试
437
三、 模拟海流环境测试
444
第四节 数值模拟流程
449
一、 三维力学模型构建
449
二、 水动力仿真分析
454
三、 模型验证与优化
461
第五节 测试工具与数据采集类型
468
一、 测试仪器配置方案
469
二、 数据采集规范制定
477
三、 数据管理措施
483
第六节 静水与规则波水池试验
489
一、 静水环境性能测试
489
二、 规则波环境测试
495
三、 性能优化方案
502
第四章 测试方案2
511
第一节 数值模拟工作
511
一、 网衣附着物水下清除设备仿真验证
511
二、 数值模拟研究报告编制
523
三、 专利技术文件准备
535
第二节 水槽试验工作
544
一、 第三方测试报告编制
544
二、 测试委托合同备案
560
第三节 水池试验工作
582
一、 水下设备性能测试
582
二、 试验报告文件准备
596
第五章 制造方案1
611
第一节 材料选型
611
一、 高强度耐腐蚀材料选择
611
二、 关键部件材料选配
621
第二节 制造流程
627
一、 结构件加工工艺
627
二、 整机装配调试
635
第三节 制造成本控制
644
一、 关键成本构成分析
644
二、 模块化设计应用
653
第四节 制造规范标准
663
一、 海洋工程材料标准
663
二、 质量管理体系实施
673
第五节 加工装备与场地证明
682
一、 主要加工设备清单
683
二、 制造场地平面布局
692
第六节 成本设计表
696
一、 主体结构成本分解
696
二、 控制系统成本构成
707
第七节 详细制造方案
713
一、 分阶段实施计划
713
二、 海试准备方案
723
第六章 制造方案2
731
第一节 制造经验要求
731
一、 智能装备制造经验
731
二、 制造合同佐证材料
745
第二节 佐证材料格式
755
一、 合同封面规范
755
二、 服务内容页要求
781
第三节 得分规则说明
795
一、 评分标准细则
795
二、 材料审核要点
806
第七章 海试养殖方案
818
第一节 养殖主体与品种
818
一、 金鲳鱼养殖主体
818
二、 石斑鱼养殖主体
834
第二节 机械化网衣清洗作业方案
858
一、 清洗设备部署
858
二、 清洗周期管理
865
第三节 灾害应急预案
878
一、 台风应急响应
878
二、 强流应对措施
887
第四节 多海况下的不同网箱作业方案
907
一、 重力式网箱方案
907
二、 深水抗风浪网箱方案
918
第八章 海试养殖方案
930
第一节 养殖经验材料
930
一、 海水鱼销售合同材料
930
二、 替代证明材料
947
三、 材料审验要求
957
第九章 海试验证方案1
967
第一节 海试流程
967
一、 设备准备阶段
967
二、 下水测试实施
978
三、 运行监测体系
983
第二节 稳定作业方案
994
一、 抗流结构优化设计
994
二、 动态定位校准系统
1002
三、 姿态控制调整策略
1009
第三节 海试计划
1016
一、 阶段性任务划分
1016
二、 维护保养制度
1024
三、 异常处理机制
1032
第四节 数据采集方案
1038
一、 多源数据采集系统
1038
二、 传感器网络配置
1051
三、 数据预处理流程
1059
第五节 安全风险处理
1069
一、 设备故障应急预案
1069
二、 恶劣天气应对
1076
三、 协同作业规范
1082
第十章 海试验证方案2
1090
第一节 海试应用案例
1090
一、 水下作业设备海试案例
1090
二、 案例材料形式要求
1108
第二节 佐证材料准备
1118
一、 科研项目验收书材料
1118
二、 合同验收书材料
1128
三、 应用证明材料
1138
第三节 材料真实性保障
1149
一、 真实性承诺
1149
二、 第三方单位配合
1156
三、 原件核对机制
1162
第十一章 技术指标
1170
第一节 技术指标验证
1170
一、 设备性能指标验证方案
1170
二、 水下越障性能验证
1182
三、 控制系统验证体系
1190
四、 清洗效果评估方案
1206
第二节 优化技术指标
1218
一、 深水耐压结构优化
1218
二、 水动力性能提升
1231
三、 导航系统精度优化
1246
四、 清洗效率提升策略
1257
第十二章 预算方案
1272
第一节 预算方案
1272
一、 设备研制全过程预算框架
1272
二、 阶段性资金管控措施
1280
三、 赛马制专项预算预案
1287
第二节 预算明细
1291
一、 核心部件采购清单
1291
二、 研发测试费用分解
1304
三、 知识产权投入规划
1311
第三节 资金测算依据
1315
一、 财政政策执行标准
1315
二、 自筹资金保障方案
1324
三、 年度资金滚动计划
1332
第十三章 实施计划
1340
第一节 制定月度计划
1340
一、 设备需求分析阶段
1340
二、 结构设计开发阶段
1351
三、 制造调试实施阶段
1358
第二节 关键节点设置
1367
一、 设计阶段里程碑
1368
二、 制造阶段关键点
1376
三、 海试阶段重要节点
1386
第三节 提供预期成果清单
1397
一、 设计阶段交付物
1397
二、 试验阶段产出物
1406
三、 示范阶段成果物
1413
设计方案1
总体设计方案
设备组成模块设计
水下动力推进系统
推进器选型设计
高效推进器选用
选用经过实践验证的高效水下推进器,具备良好水动力性能与可靠性。为适应海洋环境,对推进器的材质和结构进行优化。在材质上,选用耐腐蚀的合金材料,增强其抗腐蚀能力;在结构设计上,采用流线型外观,减少水流阻力。此外,对推进器的内部构造进行改良,提高其动力转换效率,进一步提升使用寿命,确保设备在长期使用中性能稳定。
水下动力推进系统
水下推进器
通过优化材质和结构,推进器不仅能在复杂海洋环境中正常运行,还能降低维护成本和更换频率,提高设备的整体经济性和可靠性。这种优化设计使推进器在海洋环境中的抗腐蚀能力显著增强,能够承受海水的侵蚀和海洋生物的附着,从而延长了使用寿命。同时,高效的动力转换效率确保了设备在水下作业时能够提供稳定的动力支持,满足各种作业需求。
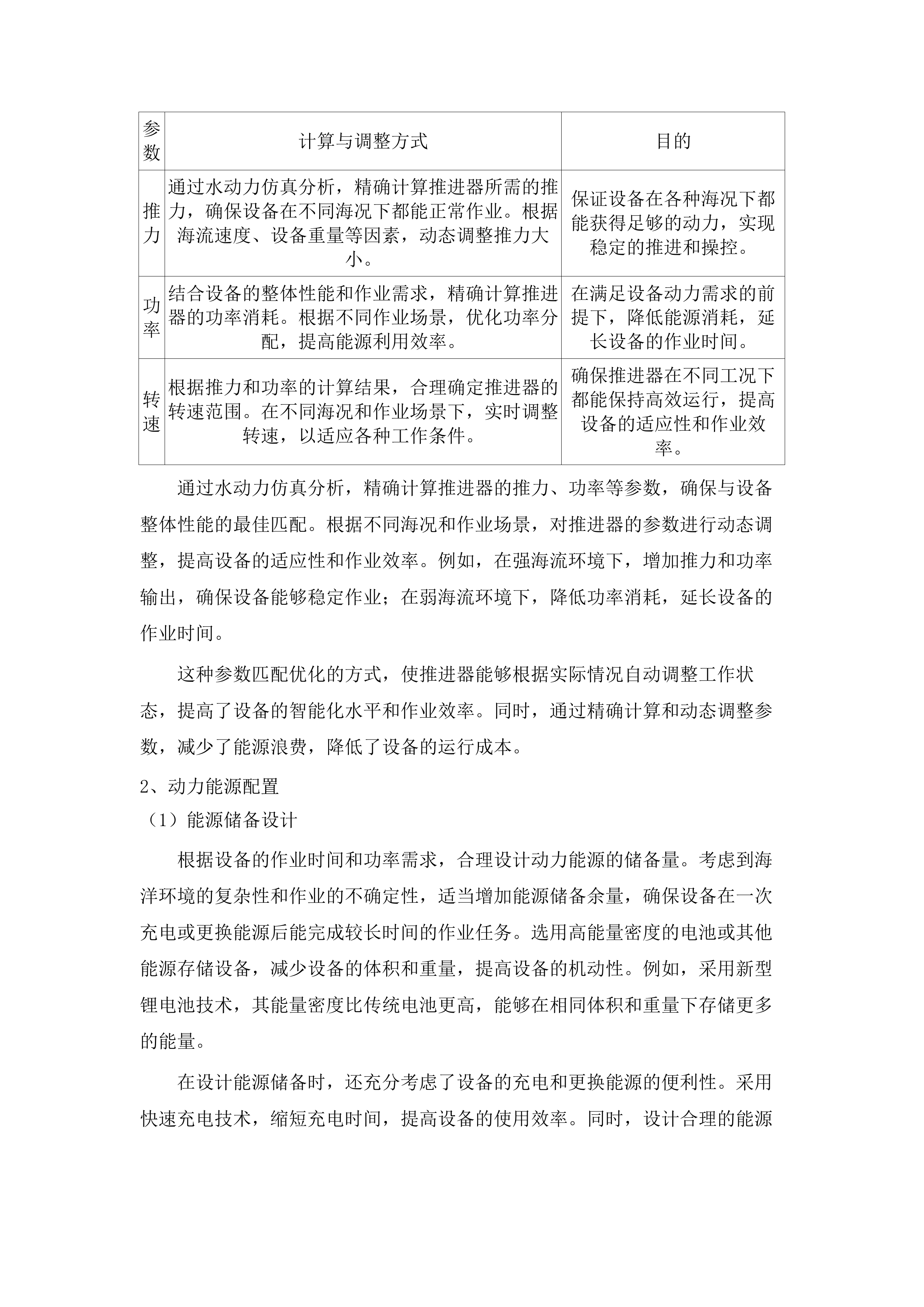
参数匹配优化
参数
计算与调整方式
目的
推力
通过水动力仿真分析,精确计算推进器所需的推力,确保设备在不同海况下都能正常作业。根据海流速度、设备重量等因素,动态调整推力大小。
保证设备在各种海况下都能获得足够的动力,实现稳定的推进和操控。
功率
结合设备的整体性能和作业需求,精确计算推进器的功率消耗。根据不同作业场景,优化功率分配,提高能源利用效率。
在满足设备动力需求的前提下,降低能源消耗,延长设备的作业时间。
转速
根据推力和功率的计算结果,合理确定推进器的转速范围。在不同海况和作业场景下,实时调整转速,以适应各种工作条件。
确保推进器在不同工况下都能保持高效运行,提高设备的适应性和作业效率。
通过水动力仿真分析,精确计算推进器的推力、功率等参数,确保与设备整体性能的最佳匹配。根据不同海况和作业场景,对推进器的参数进行动态调整,提高设备的适应性和作业效率。例如,在强海流环境下,增加推力和功率输出,确保设备能够稳定作业;在弱海流环境下,降低功率消耗,延长设备的作业时间。
这种参数匹配优化的方式,使推进器能够根据实际情况自动调整工作状态,提高了设备的智能化水平和作业效率。同时,通过精确计算和动态调整参数,减少了能源浪费,降低了设备的运行成本。
动力能源配置
能源储备设计
根据设备的作业时间和功率需求,合理设计动力能源的储备量。考虑到海洋环境的复杂性和作业的不确定性,适当增加能源储备余量,确保设备在一次充电或更换能源后能完成较长时间的作业任务。选用高能量密度的电池或其他能源存储设备,减少设备的体积和重量,提高设备的机动性。例如,采用新型锂电池技术,其能量密度比传统电池更高,能够在相同体积和重量下存储更多的能量。
在设计能源储备时,还充分考虑了设备的充电和更换能源的便利性。采用快速充电技术,缩短充电时间,提高设备的使用效率。同时,设计合理的能源更换接口,方便在海上进行能源更换操作。此外,对能源储备系统进行优化管理,实时监测能源剩余量,确保设备在作业过程中不会因能源不足而中断。
能源管理策略
开发智能能源管理系统,实时监测动力能源的使用情况,根据设备的运行状态自动调整能源分配。在设备启动和加速阶段,提供足够的能源支持,确保设备能够快速响应;在设备稳定运行阶段,优化能源消耗,降低功率输出,延长能源使用时间。采用节能模式和优化的能源消耗策略,降低设备的能源消耗,延长设备的作业时间。例如,在设备闲置时,自动进入低功耗模式,减少能源浪费。
智能能源管理系统还具备故障诊断和预警功能,能够及时发现能源系统的异常情况,并采取相应的措施进行处理。通过对能源使用数据的分析和统计,为设备的维护和优化提供依据。此外,系统还可以与其他设备进行信息交互,实现能源的协同管理,进一步提高能源利用效率。
推进系统布局
均匀分布设计
将推进器均匀分布在设备的不同部位,使设备在各个方向上都能获得稳定的推力,提高设备的操控性和稳定性。通过水动力仿真分析,优化推进器的布局位置和角度,减少水流对推进系统的干扰。例如,将推进器对称分布在设备的两侧,确保设备在水平方向上的推力平衡;调整推进器的安装角度,使其与水流方向相适应,降低水流阻力。
在推进器的布局设计中,还考虑了设备的重心和平衡性。合理安排推进器的位置,使设备的重心保持在合适的范围内,避免因推力不均而导致设备倾斜或晃动。此外,对推进器之间的间距进行优化,减少相互之间的干扰,提高推进系统的整体效率。
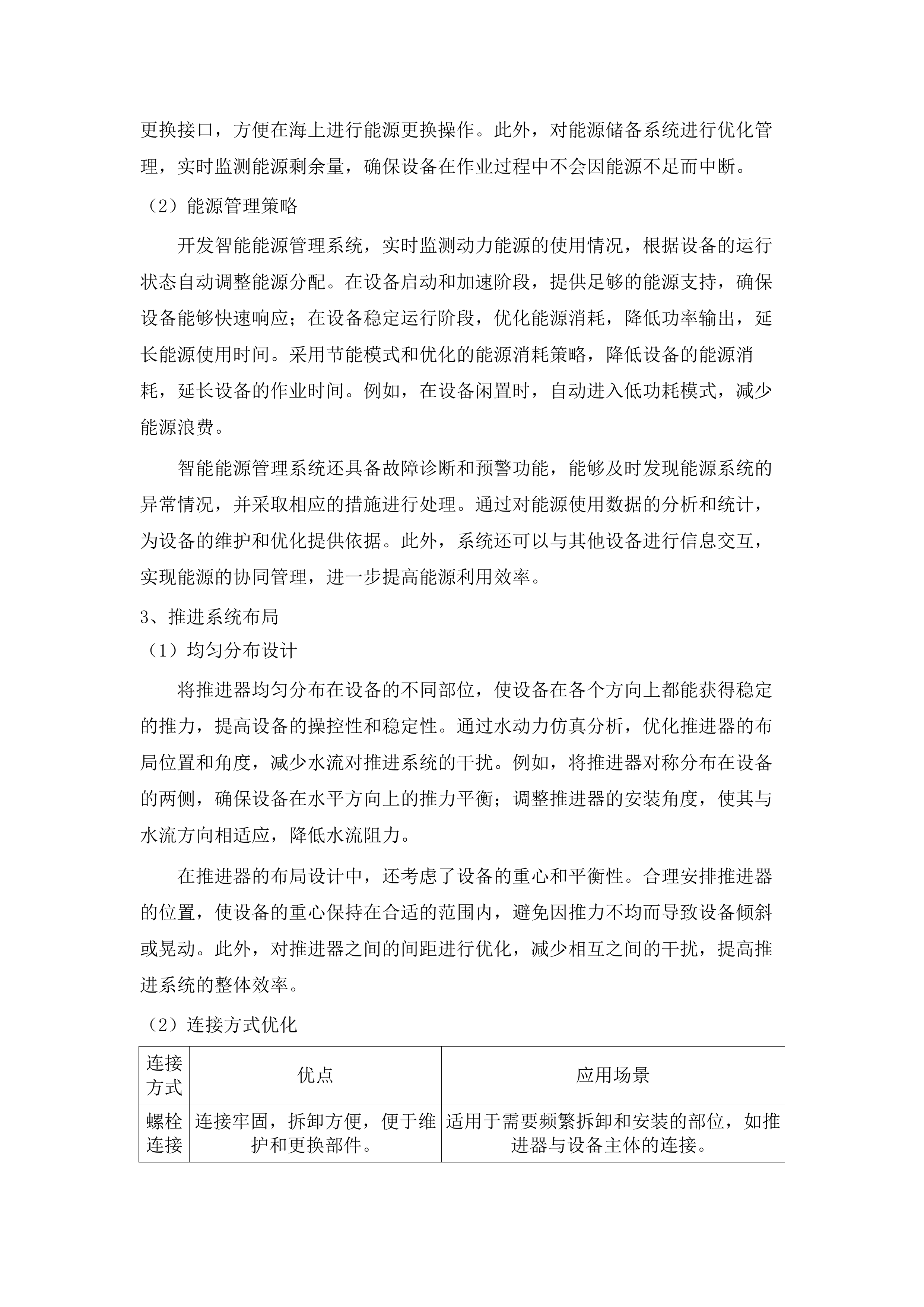
连接方式优化
连接方式
优点
应用场景
螺栓连接
连接牢固,拆卸方便,便于维护和更换部件。
适用于需要频繁拆卸和安装的部位,如推进器与设备主体的连接。
焊接连接
连接强度高,密封性好,能够有效防止海水侵入。
适用于对连接强度和密封性要求较高的部位,如推进器的内部结构连接。
卡箍连接
安装简单,灵活性高,能够适应一定的变形和位移。
适用于需要快速连接和拆卸的部位,如管道与推进器的连接。
采用先进的连接技术和材料,确保推进系统与设备其他部件之间的可靠连接,减少振动和能量损失。优化连接结构,便于推进系统的安装、维护和更换,提高设备的可维护性。例如,采用高强度的螺栓和密封垫片,确保连接的牢固性和密封性;设计合理的连接接口,使推进器能够快速、准确地安装到设备上。
在连接方式的选择上,充分考虑了海洋环境的特殊性。采用耐腐蚀的材料和防护措施,防止连接部位受到海水的侵蚀和腐蚀。同时,对连接部位进行定期检查和维护,确保连接的可靠性和安全性。
清洗工具集成模块
清洗工具选型
清洗方式确定
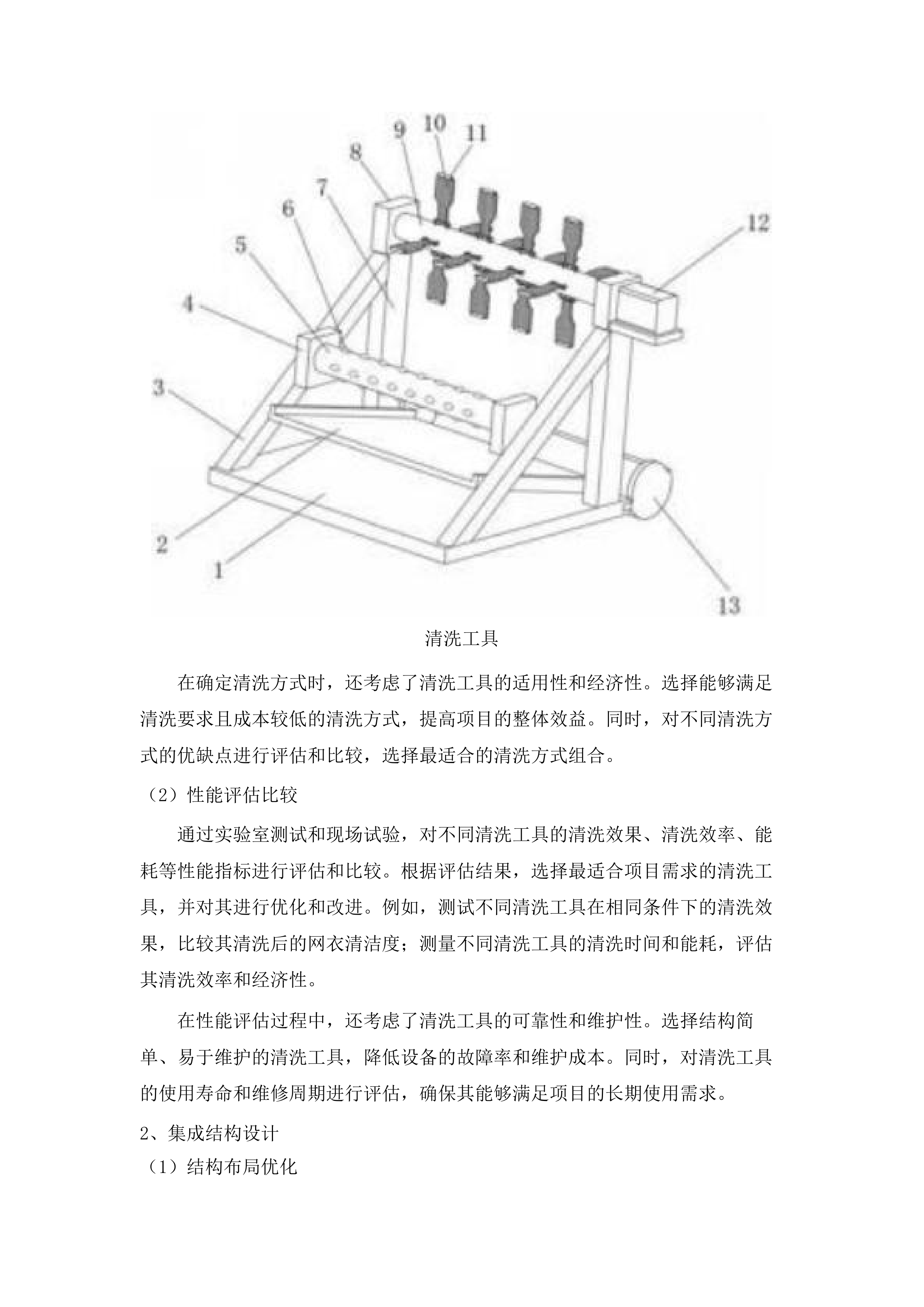
结合实际作业情况,确定采用单一清洗方式或多种清洗方式相结合的方案,以提高清洗效率和质量。根据网衣的材质和结构,调整清洗工具的参数和工作方式,避免对网衣造成损坏。例如,对于较脆弱的网衣材质,采用低压、高频的清洗方式;对于较坚固的网衣材质,采用高压、低频的清洗方式。
清洗工具
在确定清洗方式时,还考虑了清洗工具的适用性和经济性。选择能够满足清洗要求且成本较低的清洗方式,提高项目的整体效益。同时,对不同清洗方式的优缺点进行评估和比较,选择最适合的清洗方式组合。
性能评估比较
通过实验室测试和现场试验,对不同清洗工具的清洗效果、清洗效率、能耗等性能指标进行评估和比较。根据评估结果,选择最适合项目需求的清洗工具,并对其进行优化和改进。例如,测试不同清洗工具在相同条件下的清洗效果,比较其清洗后的网衣清洁度;测量不同清洗工具的清洗时间和能耗,评估其清洗效率和经济性。
在性能评估过程中,还考虑了清洗工具的可靠性和维护性。选择结构简单、易于维护的清洗工具,降低设备的故障率和维护成本。同时,对清洗工具的使用寿命和维修周期进行评估,确保其能够满足项目的长期使用需求。
集成结构设计
结构布局优化
根据清洗工具的工作原理和设备的整体结构,优化集成结构的布局,使清洗工具能够充分发挥其作用。考虑清洗工具的操作空间和维护需求,合理安排集成结构的位置和尺寸,提高设备的可操作性和可维护性。例如,将清洗工具布置在设备的前端,便于直接接触网衣进行清洗;为清洗工具预留足够的操作空间,方便操作人员进行调整和维护。
在结构布局设计中,还考虑了设备的重心和平衡性。合理安排清洗工具的重量分布,使设备在运行过程中保持稳定。同时,对集成结构的强度和刚度进行优化,确保其能够承受清洗工具的工作压力和振动。
连接方式设计
采用可靠的连接方式,确保清洗工具与设备其他部件之间的紧密连接,减少振动和松动。设计便于拆卸和安装的连接结构,方便清洗工具的更换和维修,提高设备的使用效率。例如,采用快速接头和密封垫圈,实现清洗工具与设备的快速连接和密封;设计可拆卸的固定架,使清洗工具能够方便地从设备上拆卸下来进行维修和更换。
在连接方式的设计中,还考虑了清洗工具的工作环境和使用要求。采用耐腐蚀、耐磨损的材料和防护措施,确保连接部位在海洋环境中能够长期稳定工作。同时,对连接部位进行定期检查和维护,确保连接的可靠性和安全性。
驱动与控制设计
驱动方式选择
根据清洗工具的功率需求和工作环境,选择合适的驱动方式,并对其进行优化和改进。考虑驱动系统的可靠性和维护性,选择具有良好性能和稳定性的驱动设备。例如,对于功率较小的清洗工具,采用电动驱动方式,具有结构简单、操作方便的优点;对于功率较大的清洗工具,采用液压驱动方式,具有动力强大、可靠性高的优点。
在驱动方式的选择中,还考虑了清洗工具的工作频率和速度要求。选择能够满足清洗工具工作要求的驱动系统,确保其能够稳定、高效地运行。同时,对驱动系统的控制系统进行优化,实现对清洗工具的精确控制和调节。
智能控制算法
算法类型
原理
应用场景
PID控制算法
根据系统的误差信号,通过比例、积分和微分运算,调整控制量,使系统达到稳定状态。
适用于对控制精度要求较高的场景,如清洗工具的速度控制。
模糊控制算法
基于模糊逻辑理论,对系统的输入和输出进行模糊化处理,通过模糊推理和决策,实现对系统的控制。
适用于对系统模型不确定或难以精确描述的场景,如清洗工具的压力控制。
神经网络控制算法
通过模拟人脑神经元的工作原理,构建神经网络模型,对系统进行学习和预测,实现对系统的智能控制。
适用于对系统动态特性复杂、难以用传统方法控制的场景,如清洗工具的自适应控制。
基于传感器技术和数据分析,开发智能控制算法,实现对清洗工具的实时监测和自动调整。根据网衣的污损情况和清洗进度,自动调整清洗工具的工作参数,提高清洗效率和质量。例如,通过传感器实时监测网衣的污损程度和清洗工具的工作状态,根据监测结果自动调整清洗工具的压力、速度和角度等参数。
在智能控制算法的开发中,还考虑了算法的实时性和可靠性。采用高效的算法结构和优化的计算方法,确保算法能够在短时间内完成计算和决策。同时,对算法进行严格的测试和验证,确保其在实际应用中能够稳定、可靠地运行。
多源定位传感系统
定位技术融合
多技术集成方案
将声呐、惯性导航、视觉辅助等定位技术有机集成,充分发挥各技术的优势,提高定位的准确性和可靠性。根据不同的作业场景和海况条件,自动切换和调整各定位技术的权重,以获得最佳的定位效果。例如,在深海环境中,声呐定位技术具有较好的作用距离和精度,可作为主要定位手段;在浅海或能见度较好的环境中,视觉辅助定位技术能够提供更直观的信息,可增加其权重。
定位技术融合
在多技术集成方案的设计中,还考虑了各定位技术之间的兼容性和互补性。通过数据融合和处理,将不同定位技术的数据进行整合和优化,消除数据之间的矛盾和误差。同时,建立自适应的定位技术切换机制,根据实际情况自动选择最合适的定位技术组合。
数据融合算法开发
研究和开发适合多源定位数据融合的算法,对不同定位技术的数据进行滤波、校正和融合处理。通过实验和验证,不断优化数据融合算法,提高定位系统的精度和稳定性。例如,采用卡尔曼滤波算法对声呐和惯性导航的数据进行融合处理,能够有效减少噪声和误差的影响;采用加权平均算法对视觉辅助定位数据进行校正,提高定位的准确性。
在数据融合算法的开发中,还考虑了算法的复杂度和实时性。选择计算量较小、运算速度较快的算法,确保能够在短时间内完成数据融合和处理。同时,对算法进行优化和改进,提高其对不同数据类型和噪声环境的适应性。
传感器选型配置
传感器性能评估
对不同类型的传感器进行性能评估和比较,选择具有高精度、高可靠性和稳定性的传感器。考虑传感器的工作范围、分辨率、响应速度等性能指标,确保其能够满足定位系统的要求。例如,对于声呐传感器,评估其作用距离、角度分辨率和目标识别能力;对于视觉传感器,评估其图像清晰度、视野范围和光照适应性。
在传感器性能评估过程中,还考虑了传感器的成本和维护性。选择性价比高、易于维护的传感器,降低项目的总体成本。同时,对传感器的使用寿命和可靠性进行评估,确保其能够在长期使用中保持稳定的性能。
布局优化设计
传感器类型
布局位置
作用
声呐传感器
设备底部或侧面
用于探测水下目标和测量距离,提供大范围的定位信息。
视觉传感器
设备前端或顶部
用于获取水下图像和视频信息,提供直观的定位和环境感知。
惯性传感器
设备重心附近
用于测量设备的姿态和运动信息,辅助其他传感器进行定位和导航。
根据设备的结构和作业特点,优化传感器的布局,使其能够最大限度地覆盖作业区域,减少定位盲区。避免传感器之间的相互干扰,确保各传感器能够独立、准确地工作。例如,将声呐传感器和视觉传感器分开布置,避免声呐信号对视觉传感器的干扰;合理调整传感器的安装角度和方向,使其能够充分发挥作用。
在布局优化设计中,还考虑了传感器的防水和防护要求。采用防水、耐腐蚀的材料和封装方式,确保传感器在海洋环境中能够正常工作。同时,对传感器的安装结构进行加固和防震处理,减少振动和冲击对传感器性能的影响。
定位误差补偿
误差分析与建模
误差来源
影响因素
建模方法
水流干扰
海流速度、方向和湍流强度
通过流体力学模型和实验数据,建立水流干扰误差模型。
传感器误差
传感器的精度、稳定性和校准误差
采用统计分析和误差传递理论,建立传感器误差模型。
环境噪声
海洋环境中的噪声水平和频率特性
通过噪声监测和信号处理技术,建立环境噪声误差模型。
对可能导致定位误差的因素进行分析和建模,如水流干扰、传感器误差等。通过实验和仿真,确定各误差因素的影响程度和规律,为误差补偿算法的开发提供依据。例如,通过模拟不同海流速度和方向下的定位情况,分析水流干扰对定位精度的影响;对传感器进行多次校准和测试,统计其误差分布和变化规律。
在误差分析与建模过程中,还考虑了误差的相关性和耦合性。采用多变量分析和系统建模方法,综合考虑各种误差因素之间的相互作用,建立准确的误差模型。同时,对误差模型进行验证和修正,确保其能够真实反映实际情况。
补偿算法开发与优化
基于误差分析和建模结果,开发误差补偿算法,对定位数据进行实时修正。通过不断的实验和优化,提高误差补偿算法的精度和可靠性,确保定位系统能够在复杂环境下稳定工作。例如,采用自适应滤波算法对定位数据进行实时滤波和修正,减少误差的影响;通过机器学习算法对误差模型进行学习和更新,提高补偿算法的适应性和准确性。
在补偿算法的开发和优化过程中,还考虑了算法的实时性和计算效率。选择计算量较小、运算速度较快的算法,确保能够在短时间内完成误差补偿和修正。同时,对算法进行硬件实现和优化,提高其在实际设备中的运行性能。
智能控制核心单元
控制逻辑架构
架构层次设计
将控制逻辑架构分为主控层、执行层和感知层,明确各层的功能和职责,实现分层控制和管理。主控层负责整个系统的决策和协调,接收感知层的数据并进行分析和处理,向执行层发送控制指令;执行层根据主控层的指令,控制设备的各个执行机构,实现具体的操作和动作;感知层负责采集设备的各种状态信息和环境数据,为控制决策提供依据。
通过合理的层次划分,提高控制逻辑的清晰度和可维护性,便于系统的升级和扩展。例如,当需要增加新的功能或设备时,只需在相应的层次进行修改和扩展,不会影响其他层次的正常运行。同时,分层控制和管理也提高了系统的可靠性和稳定性,当某一层出现故障时,不会影响其他层的工作。
信息传递优化
采用高速、可靠的通信协议,确保主控单元与传感器、执行器之间的信息传递准确、及时。优化信息传递的路径和方式,减少信息延迟和干扰,提高系统的响应速度和控制精度。例如,采用以太网通信协议实现高速数据传输,采用光纤通信方式减少信号干扰和衰减。
在信息传递优化过程中,还考虑了信息的安全性和保密性。采用加密技术对传输的信息进行加密处理,防止信息被窃取和篡改。同时,建立信息备份和恢复机制,确保在信息丢失或损坏时能够及时恢复。
手动/自动切换机制
切换方式设计
切换方式
操作方法
适用场景
按钮切换
通过设备上的按钮进行手动/自动模式的切换。
适用于现场操作人员需要快速切换模式的场景。
远程指令切换
通过远程通信设备发送指令进行手动/自动模式的切换。
适用于操作人员不在现场或需要远程控制的场景。
自动切换
根据设备的运行状态和预设条件,自动进行手动/自动模式的切换。
适用于需要根据不同工况自动调整控制模式的场景。
提供多种手动/自动切换方式,如按钮切换、远程指令切换等,满足不同操作人员的使用习惯。在切换过程中,对设备的状态进行实时监测和判断,确保切换的安全性和可靠性。例如,在手动模式切换到自动模式时,检查设备的各项参数是否正常,是否满足自动运行的条件;在自动模式切换到手动模式时,确保操作人员能够及时接管设备的控制。
在切换方式的设计中,还考虑了切换的平滑性和稳定性。采用过渡算法和缓冲机制,避免设备在切换过程中出现突然的变化和冲击。同时,对切换过程进行记录和存储,以便后续的分析和追溯。
平稳过渡保障
过渡算法
原理
应用场景
线性过渡算法
根据设备的初始状态和目标状态,通过线性插值的方法,实现设备状态的平滑过渡。
适用于状态变化较为缓慢的场景。
非线性过渡算法
采用非线性函数对设备的状态进行调整,实现更快、更平滑的过渡。
适用于状态变化较为剧烈的场景。
自适应过渡算法
根据设备的实时状态和环境条件,自动调整过渡算法的参数,实现最优的过渡效果。
适用于工况复杂、变化频繁的场景。
开发切换过渡算法,在手动/自动切换过程中,实现设备的平稳过渡,避免设备的突然加速、减速或停顿。通过实验和验证,优化切换过渡算法,确保切换过程的稳定性和可靠性。例如,在手动模式切换到自动模式时,采用过渡算法使设备的速度和姿态逐渐调整到自动运行的状态;在自动模式切换到手动模式时,使设备的控制权平稳地过渡到操作人员手中。
在平稳过渡保障的设计中,还考虑了设备的安全保护机制。在过渡过程中,设置合理的安全阈值和保护措施,防止设备因过渡过程中的异常情况而发生故障或事故。同时,对过渡算法进行实时监测和调整,确保其在不同工况下都能实现平稳过渡。
紧急停止策略
停止条件设定
明确紧急停止的触发条件,如设备故障、人员危险、异常信号等。对不同的触发条件进行分类和分级,制定相应的紧急停止措施。例如,对于设备故障类触发条件,根据故障的严重程度和影响范围,分为一级故障、二级故障等,分别采取不同的停止措施;对于人员危险类触发条件,如检测到人员进入危险区域,立即停止设备的运行。
在停止条件的设定中,还考虑了设备的工作环境和特点。根据不同的作业场景和工况,设置合理的触发条件和阈值,确保在各种情况下都能及时、准确地
网衣附着物水下清除专用设备研制与工程示范采购项目(二次).docx


